外观
2.1.1机器人
点击“+机器人”按钮,弹出右侧面板,机器人库中当前已囊括16种常见品牌机器人,可直接选择对应型号后点击“确认”进行添加。 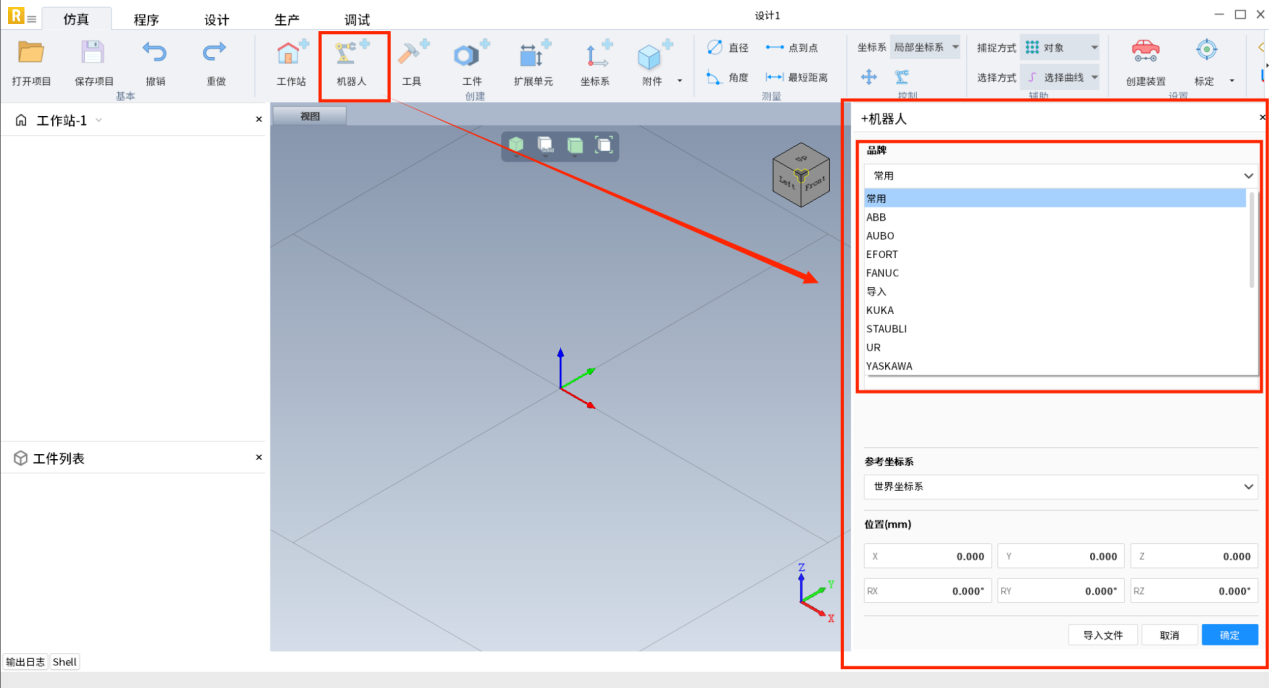
本案例选用ABB品牌IRB1200_5,点击“确认”完成添加。 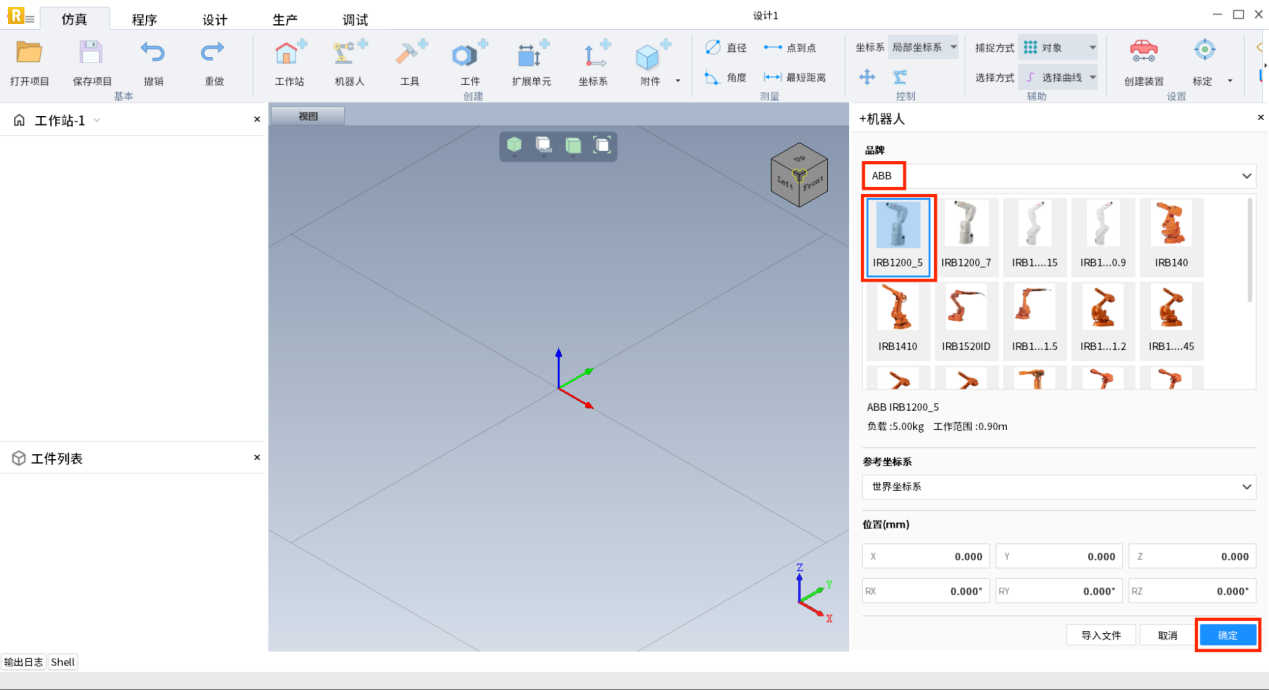 添加成功。
添加成功。 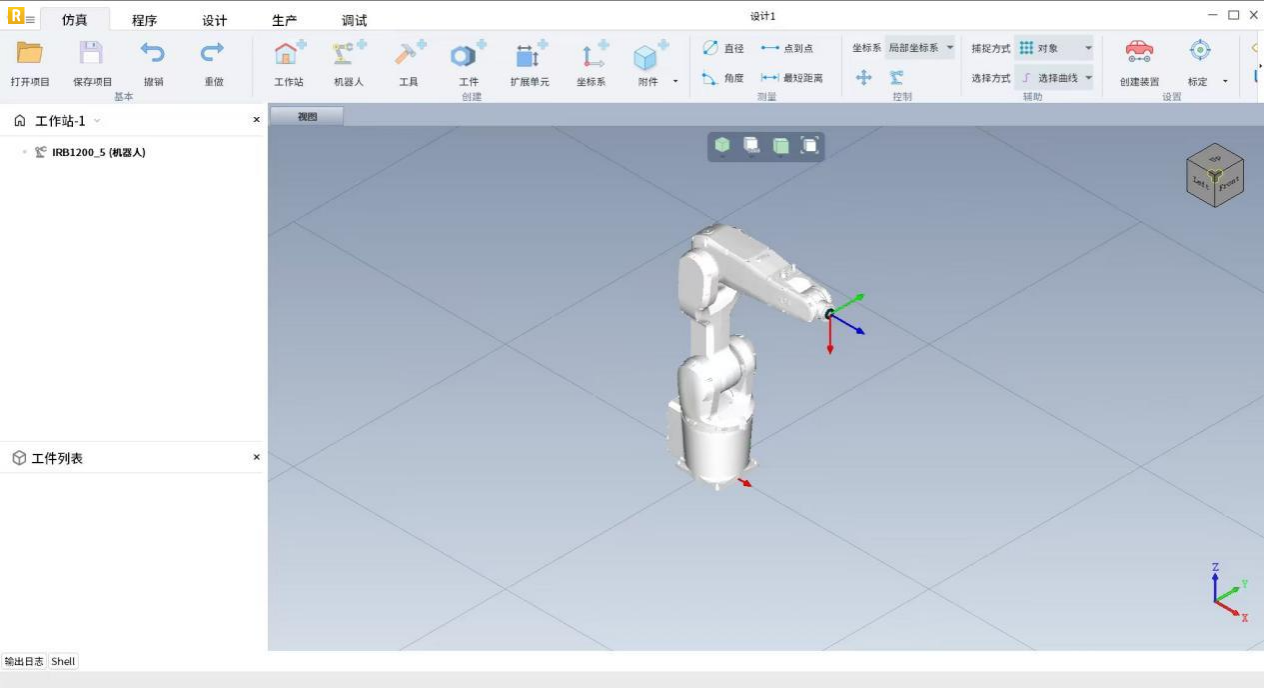
基础操作
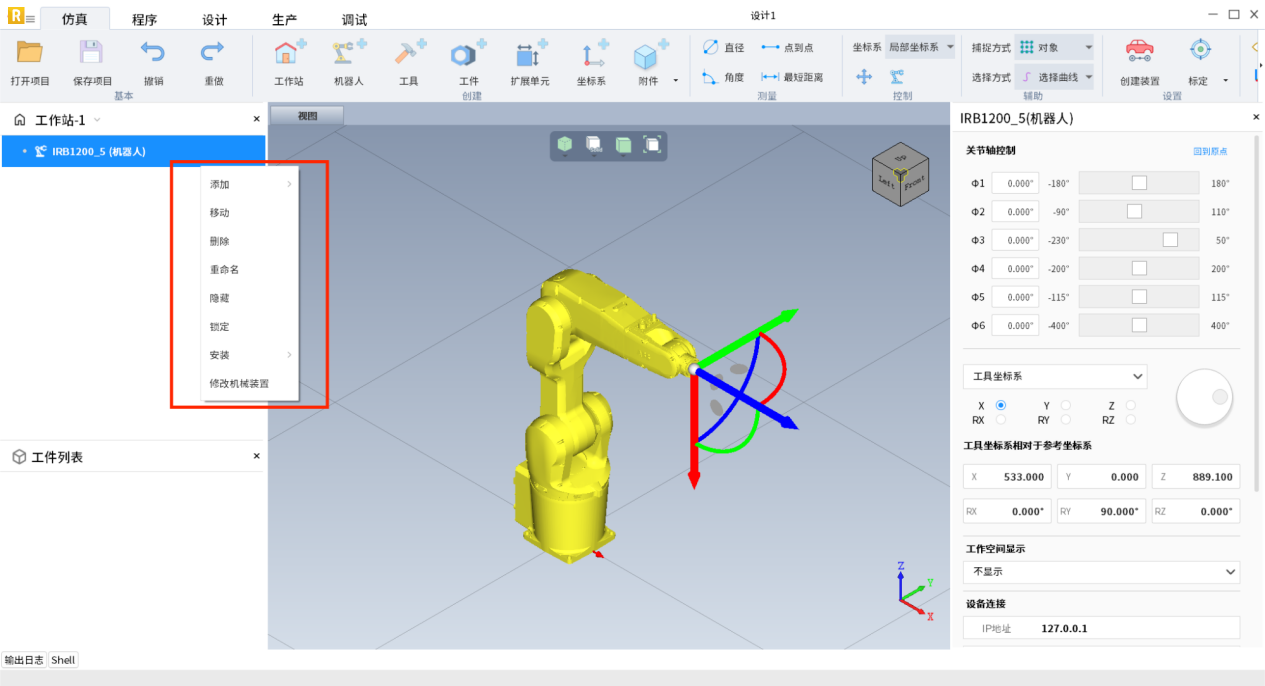
鼠标右键点击左侧设备树中的机器人,出现命令栏,可进行相应操作。
| 命令 | 功能 |
|---|---|
| 添加 | 在该机器人上添加工具 |
| 移动 | 移动机器人位置 |
| 删除 | 将此对象从图形视窗和设备树节点删除 |
| 重命名 | 重命名此对象 |
| 隐藏(显示) | 隐藏当前选中对象 |
| 锁定(解锁) | 无法通过视图选中该对象 |
| 安装(卸载) | 将当前机器人安装在外部轴上 |
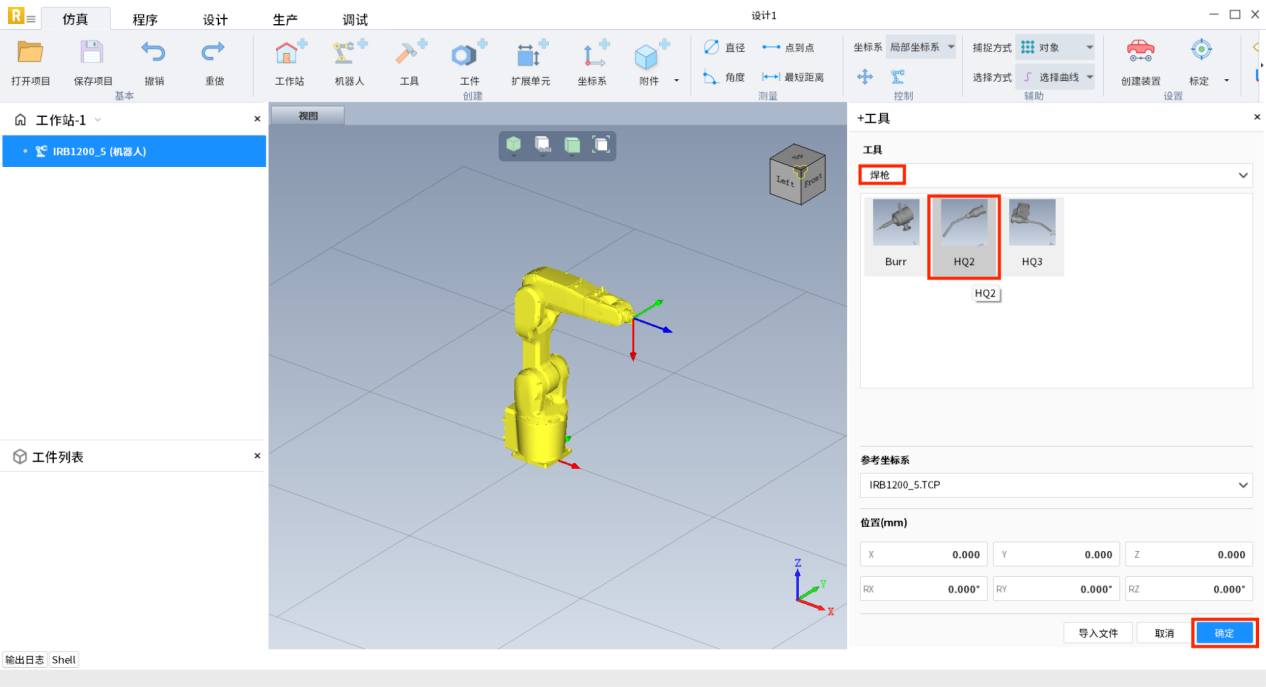
添加
在该机器人上添加工具,本案例中选择添加焊枪HQ2。 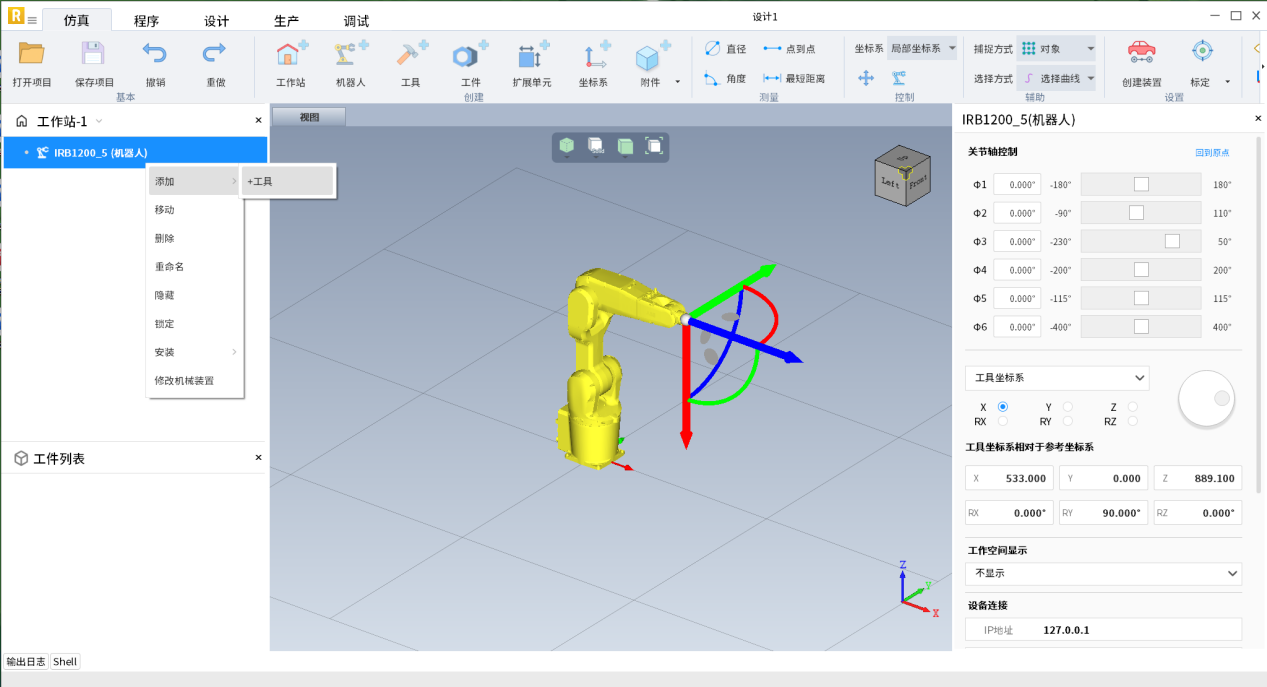
添加成功。 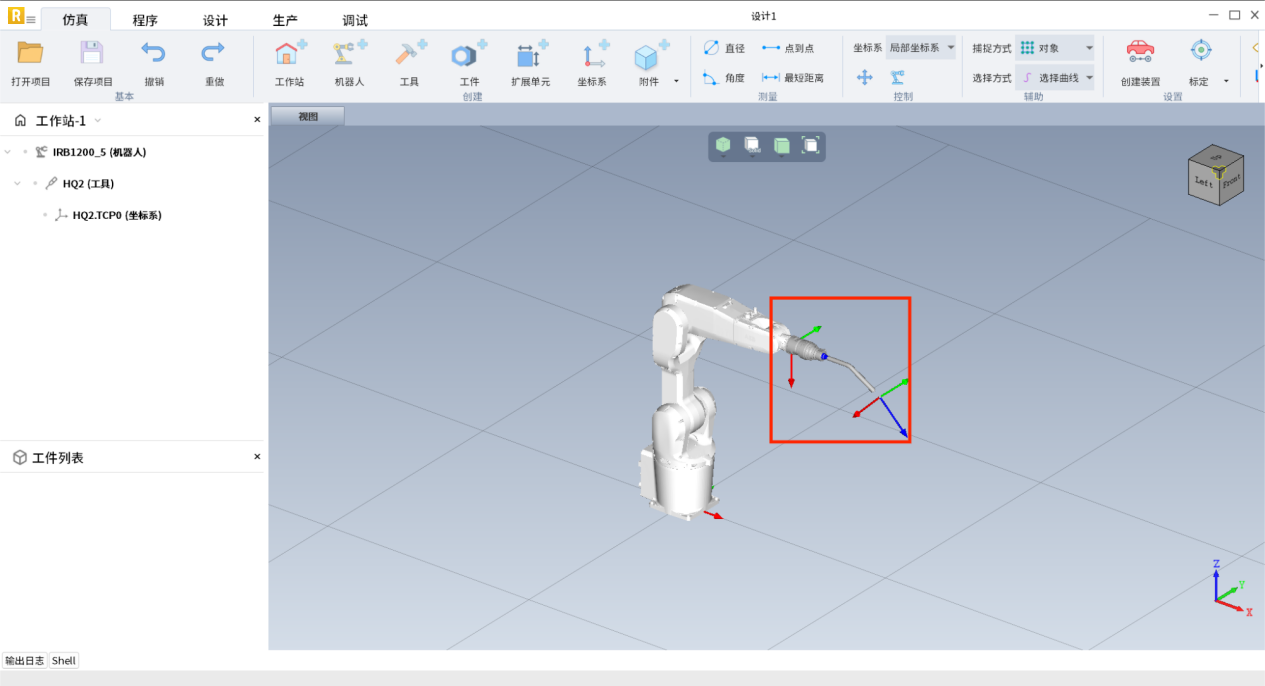
移动
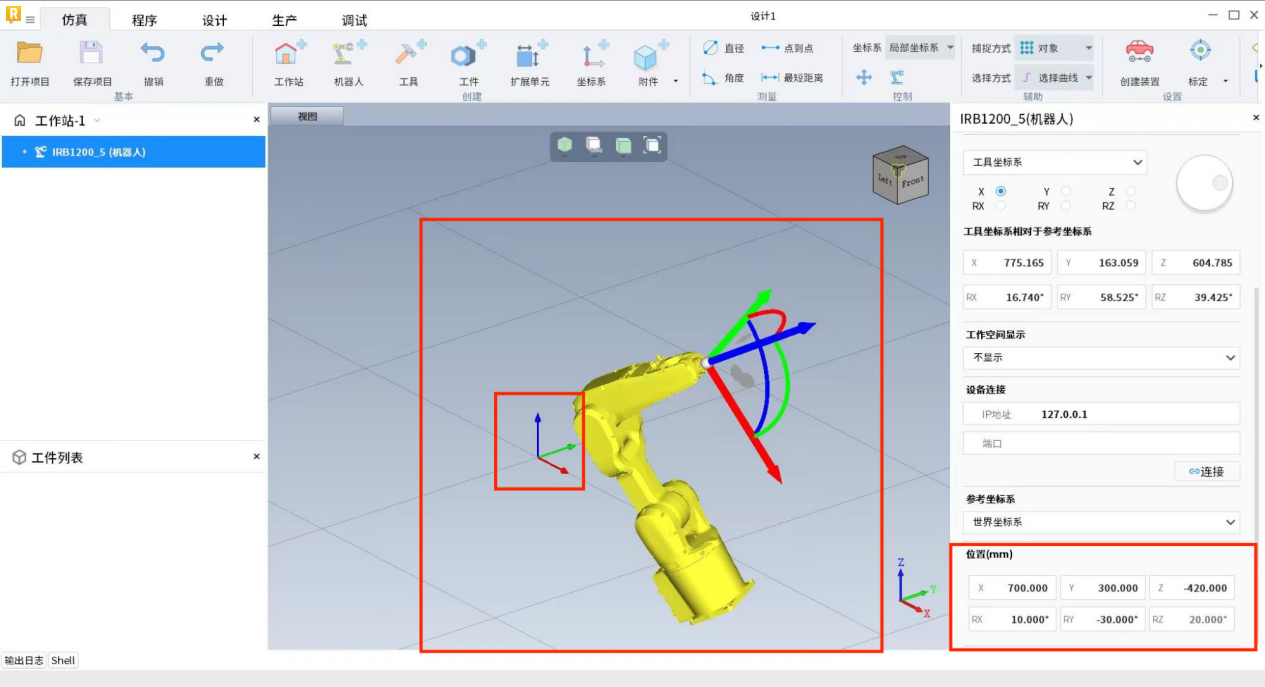
点击移动后,图形视窗中出现移动手柄,右侧弹出属性面板。可直接在图形视窗中通过移动手柄移动机器人位置,也可在属性面板中直接通过位姿参数调整机器人位置。 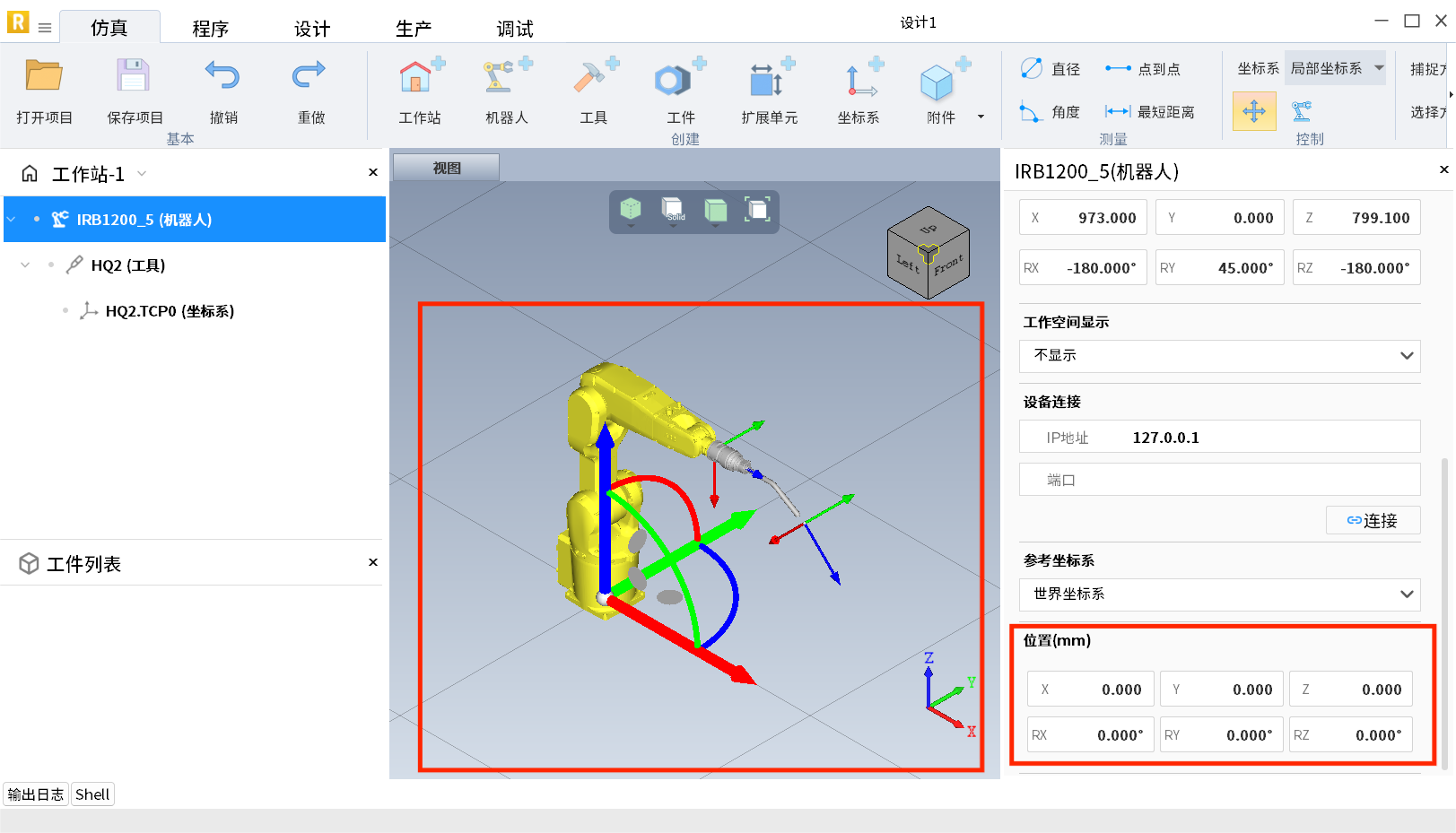
下图为随机改变位置之后的机器人。 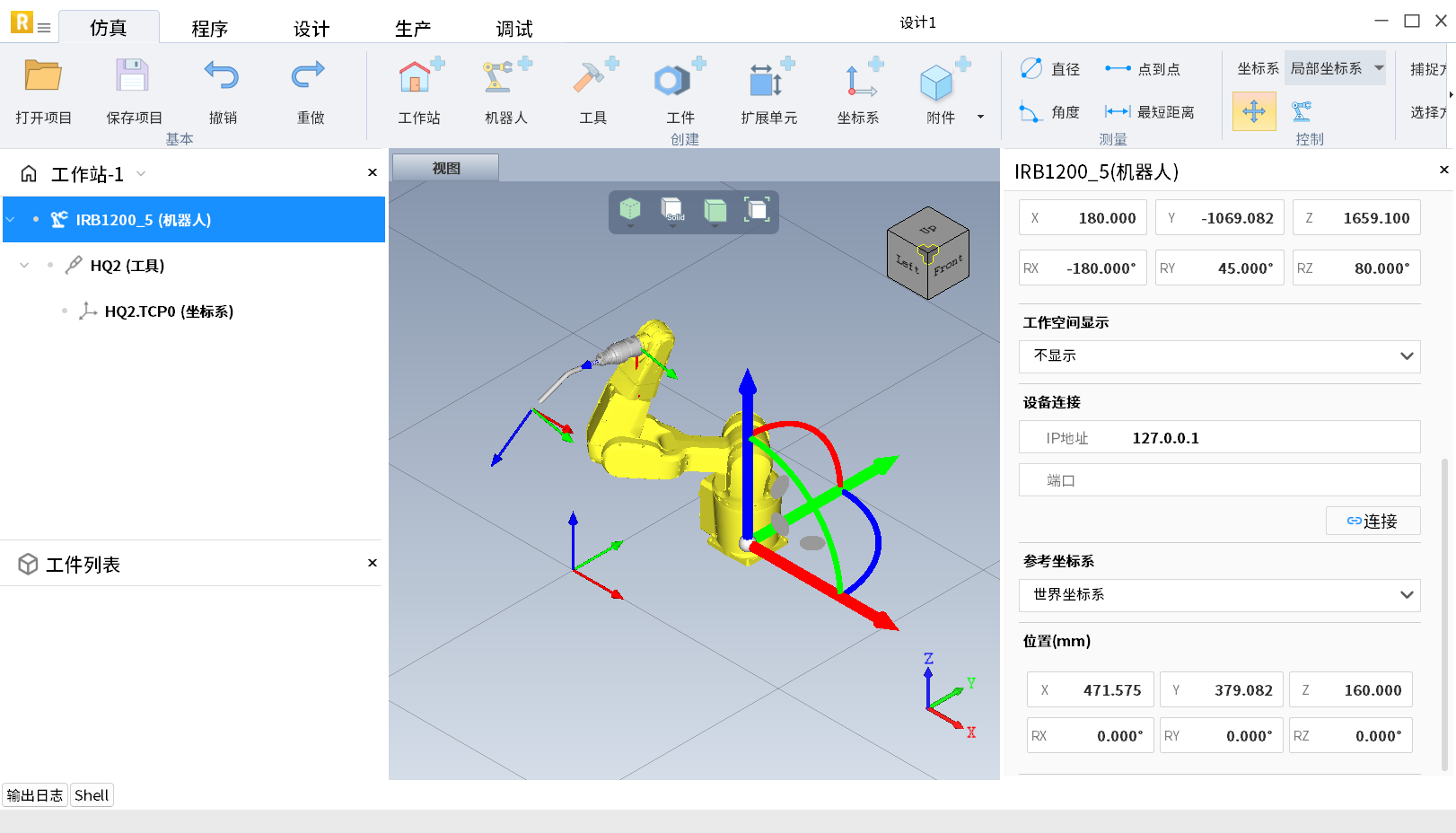
删除
点击删除,则将机器人从图形视窗删除,机器人下的工具等也会同步被删除。删除后工作站如下图所示。 
重命名
本软件中设备树内所有重命名功能都是对当前选中的对象进行名称更改,故在此做统一说明,后文不再赘述。 点击重命名,如下图所示,可进行更改。 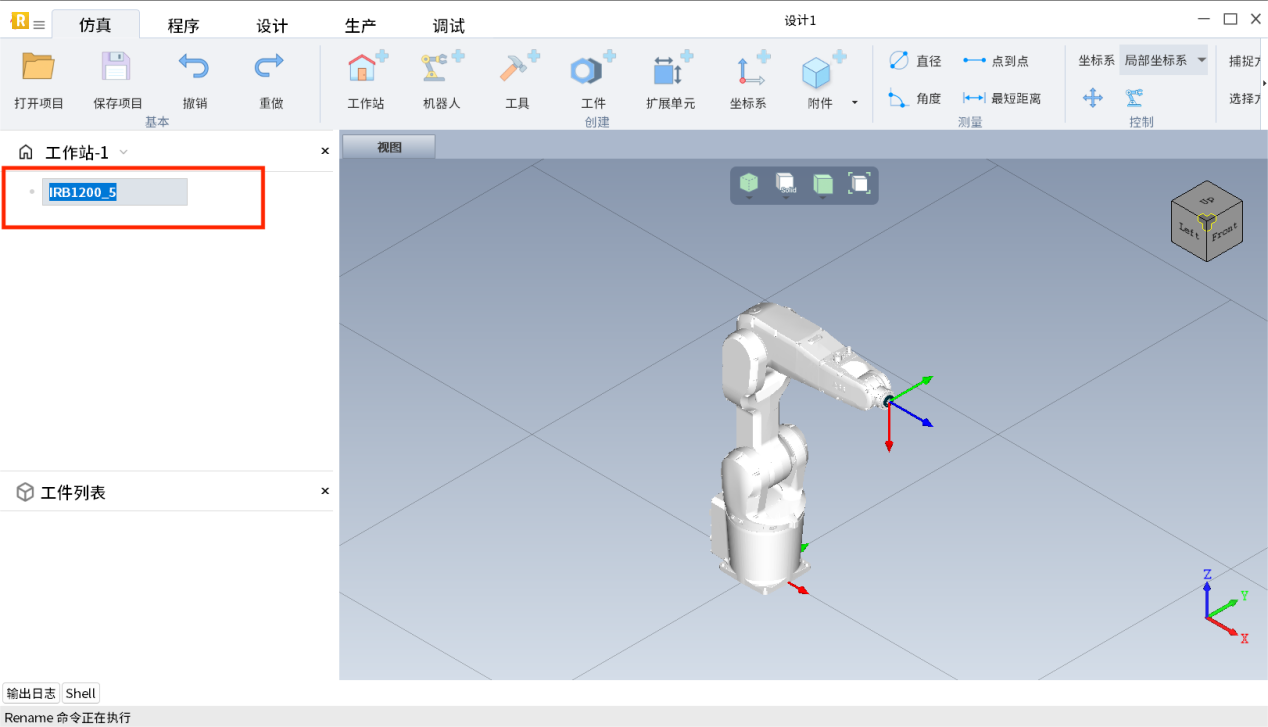
更改IRB1200_5名称为机器人demo,更改后效果如下图所示。 
隐藏
本软件中设备树内所有隐藏功能都是在图形视窗中隐藏当前选中的对象,故在此做统一说明,后文不再赘述。 下图为图形视窗中机器人默认显示状态。 
点击隐藏后,机器人不在图形视窗中显示,效果如下图所示。 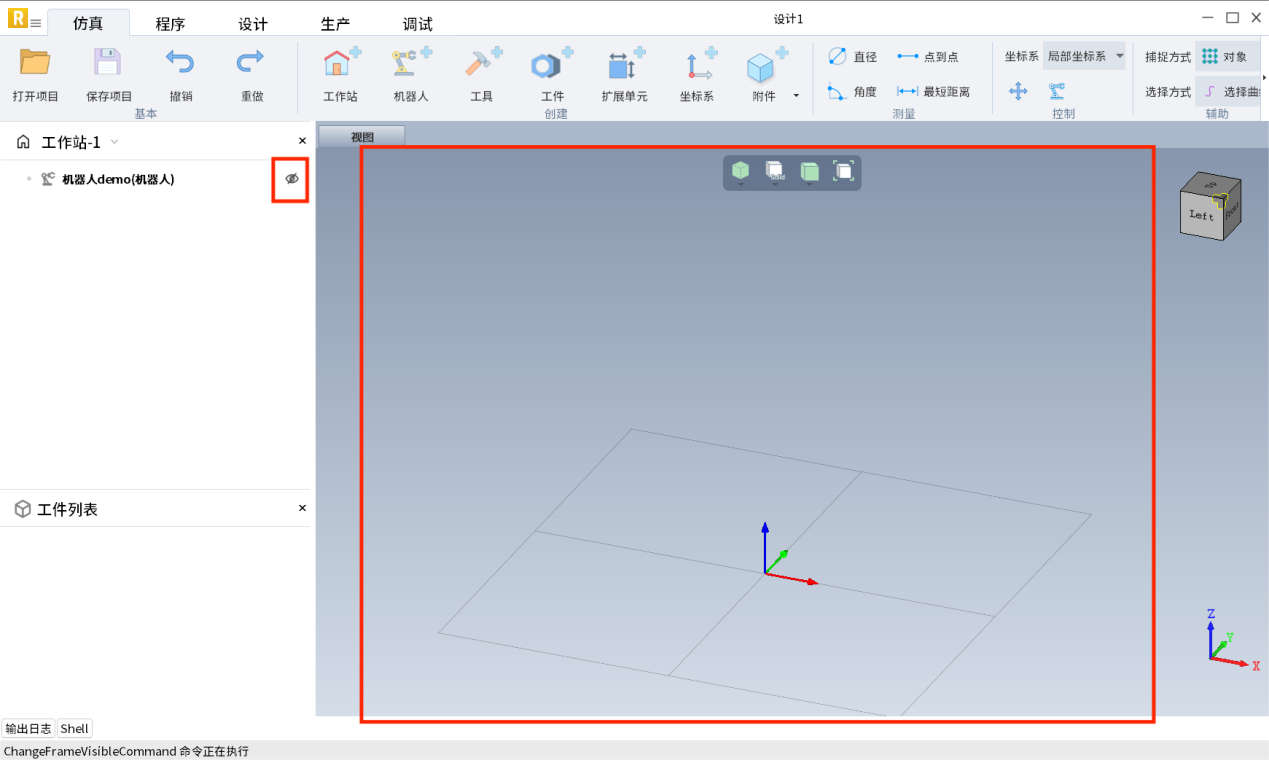
点击“隐藏”按钮后,“隐藏”按钮会变为“显示”按钮如下图所示。 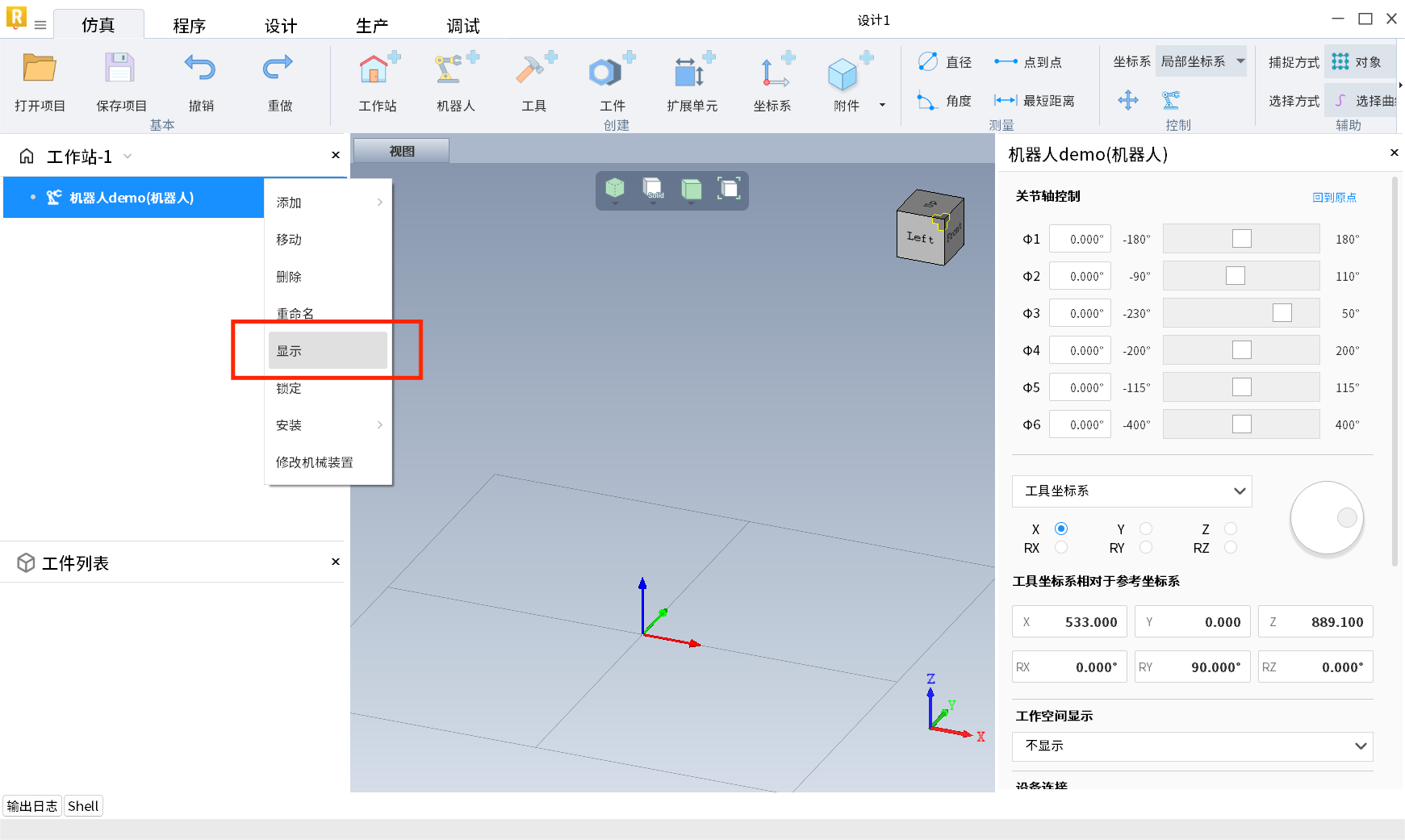
在左侧图形视窗中右键点击“显示”按钮,机器人恢复显示之后效果如下图所示。 
锁定
点击锁定后,机器人无法通过视图选中,在图形视窗中点击机器人不会再弹出机器人属性面板,如下图所示。 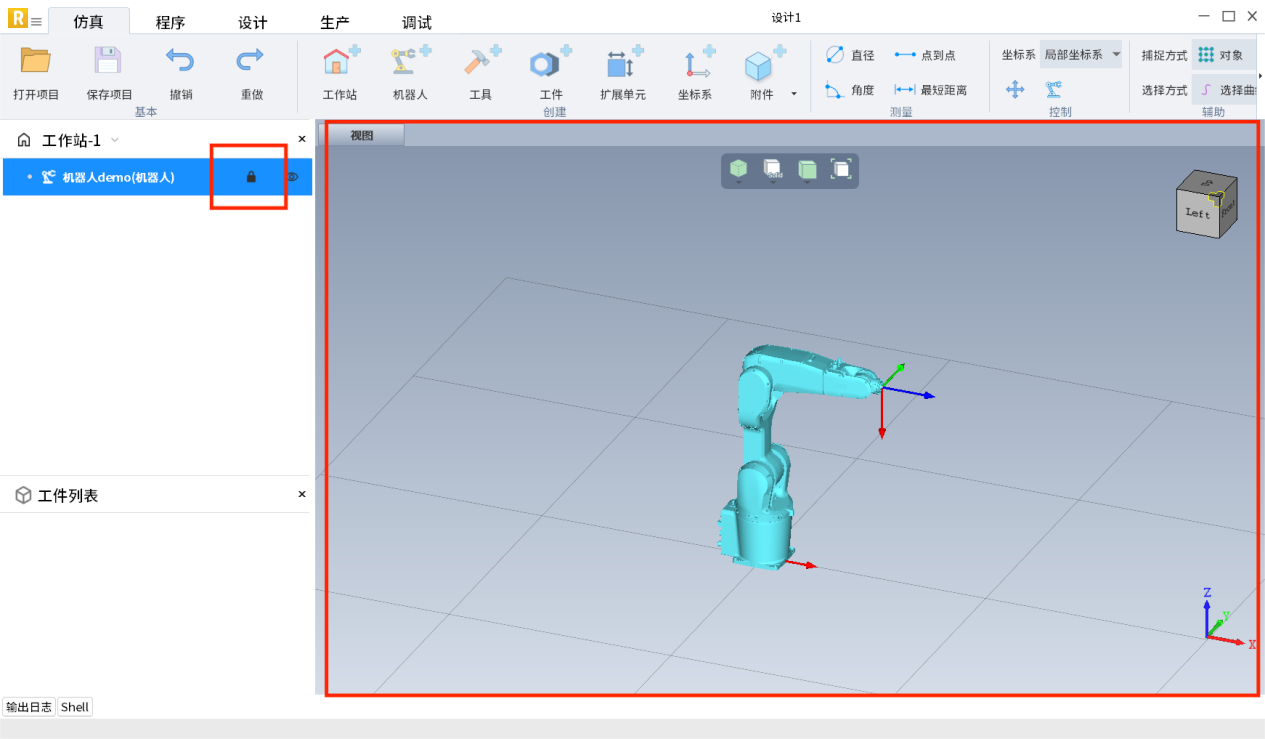
点击“锁定”按钮后,“锁定”按钮会变为“解锁”按钮如下图所示。 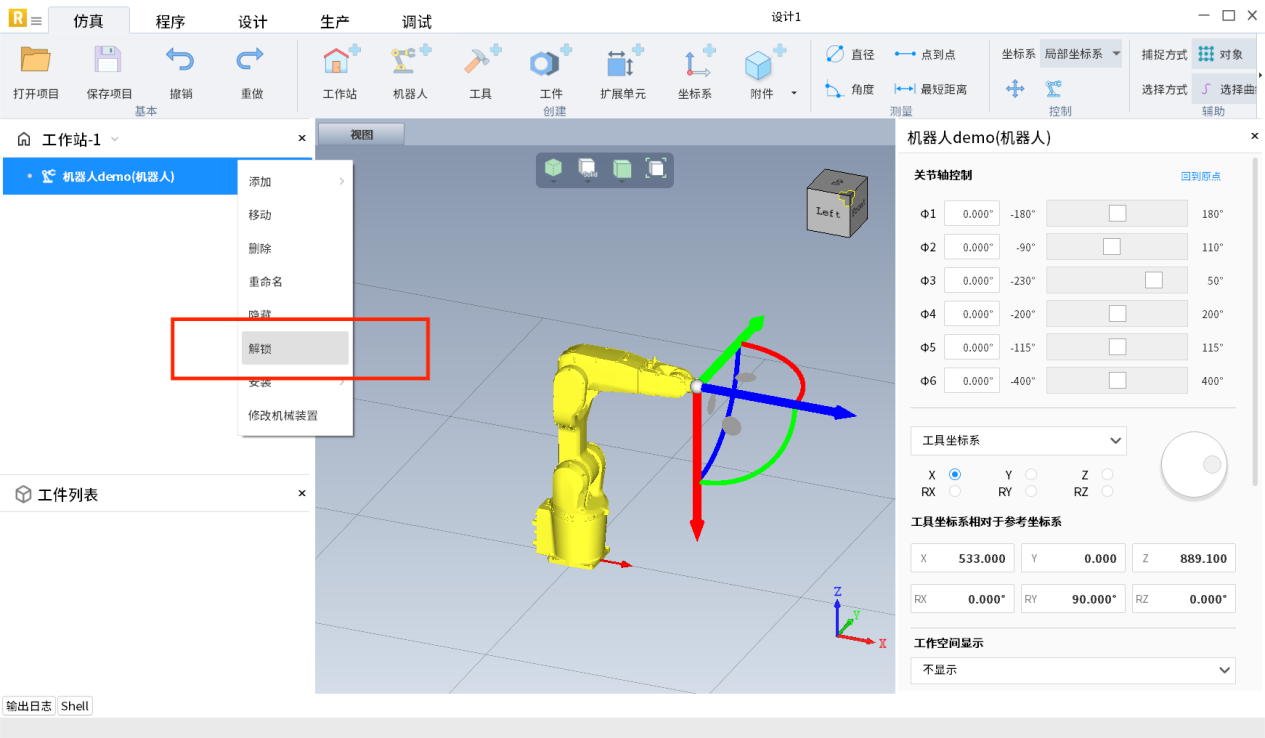
解锁后图形视窗中点击机器人会弹出机器人属性面板,如下图所示。 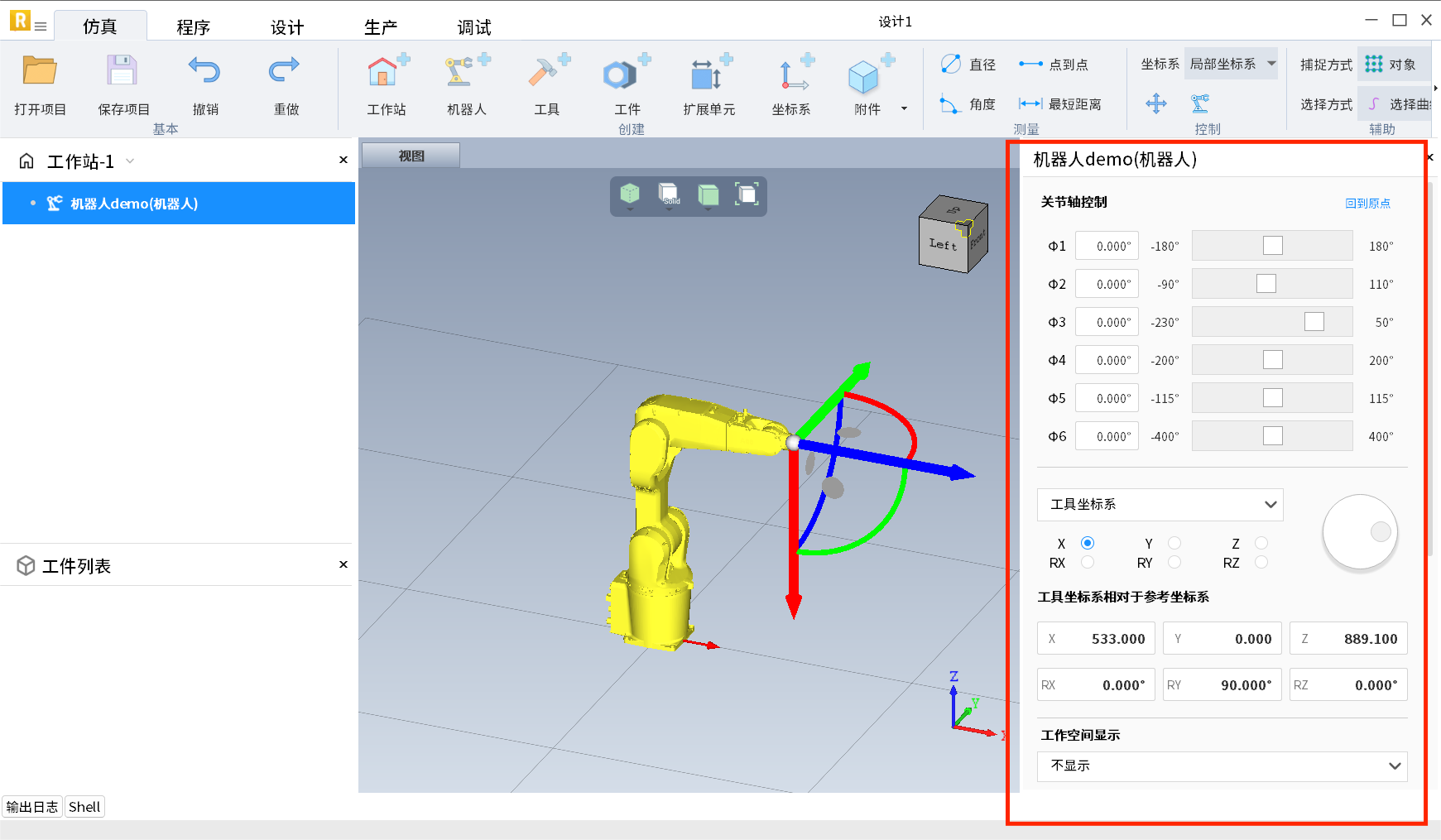 E.g.一些附件(地面、清枪站、栅栏......),添加以后是不会再去移动了,就锁定住。方便我选择其他物体。
E.g.一些附件(地面、清枪站、栅栏......),添加以后是不会再去移动了,就锁定住。方便我选择其他物体。
安装
导入一个扩展单元。本案例中以导入地轨RailTwo为例。导入后机器人并未安装在地轨上如下图所示(红色表示二者碰撞)。 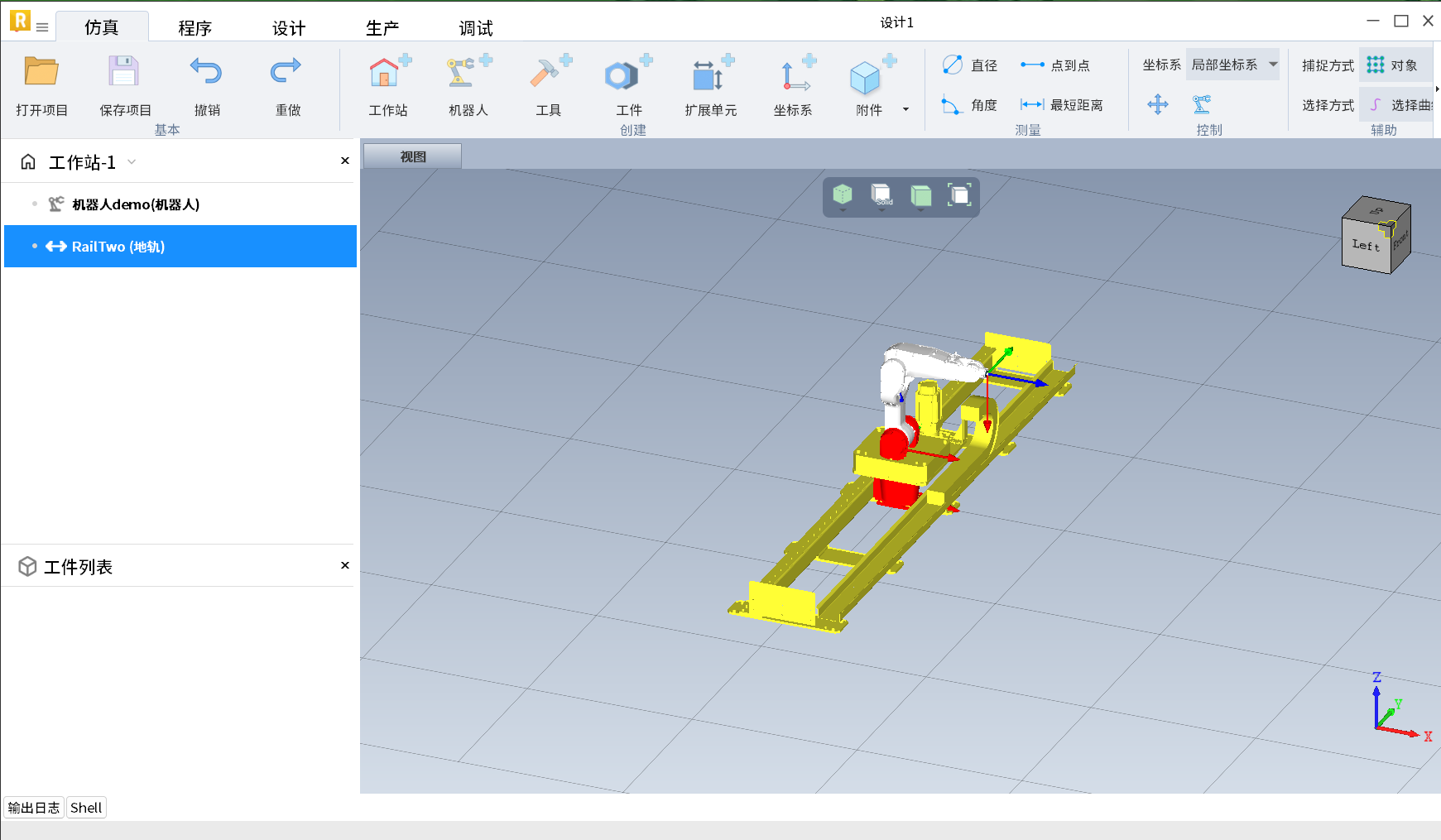 设备树中鼠标右键点击机器人后,将鼠标悬浮到安装上,会自动出现可安装的对象,选择RailTwo,即可将机器人安装在地轨上。
设备树中鼠标右键点击机器人后,将鼠标悬浮到安装上,会自动出现可安装的对象,选择RailTwo,即可将机器人安装在地轨上。 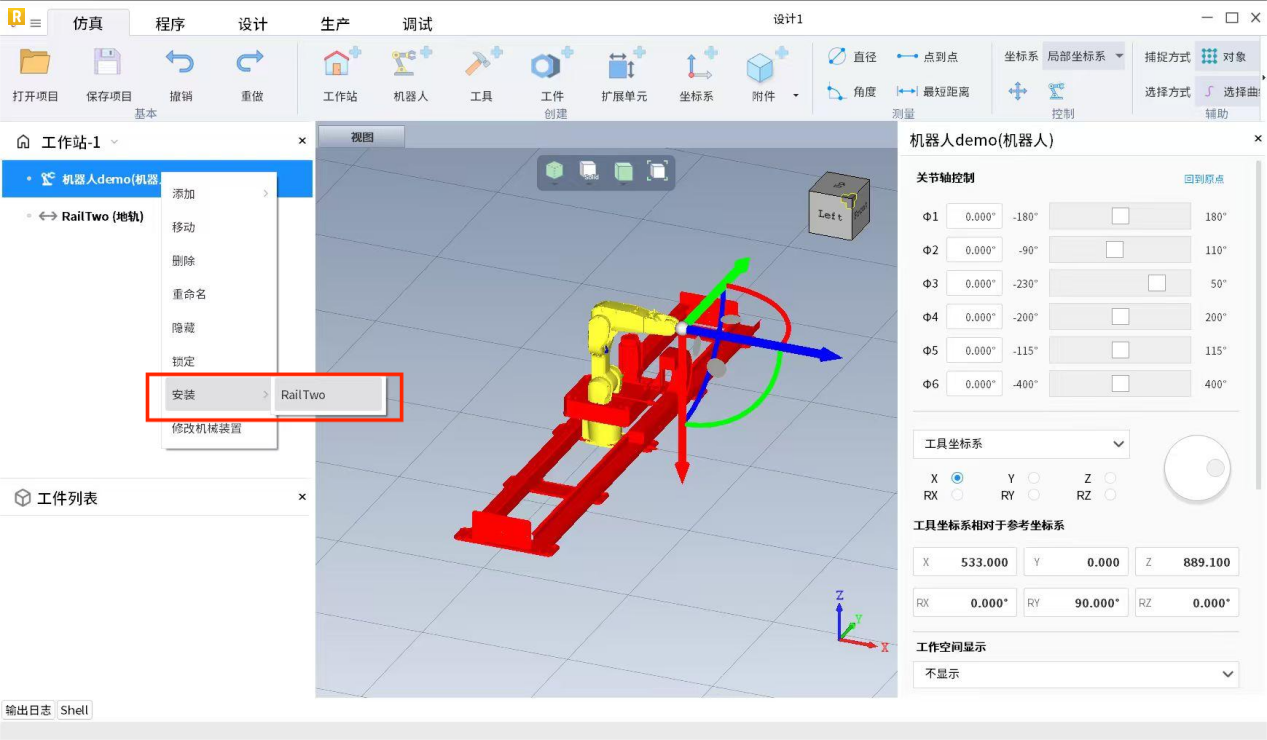
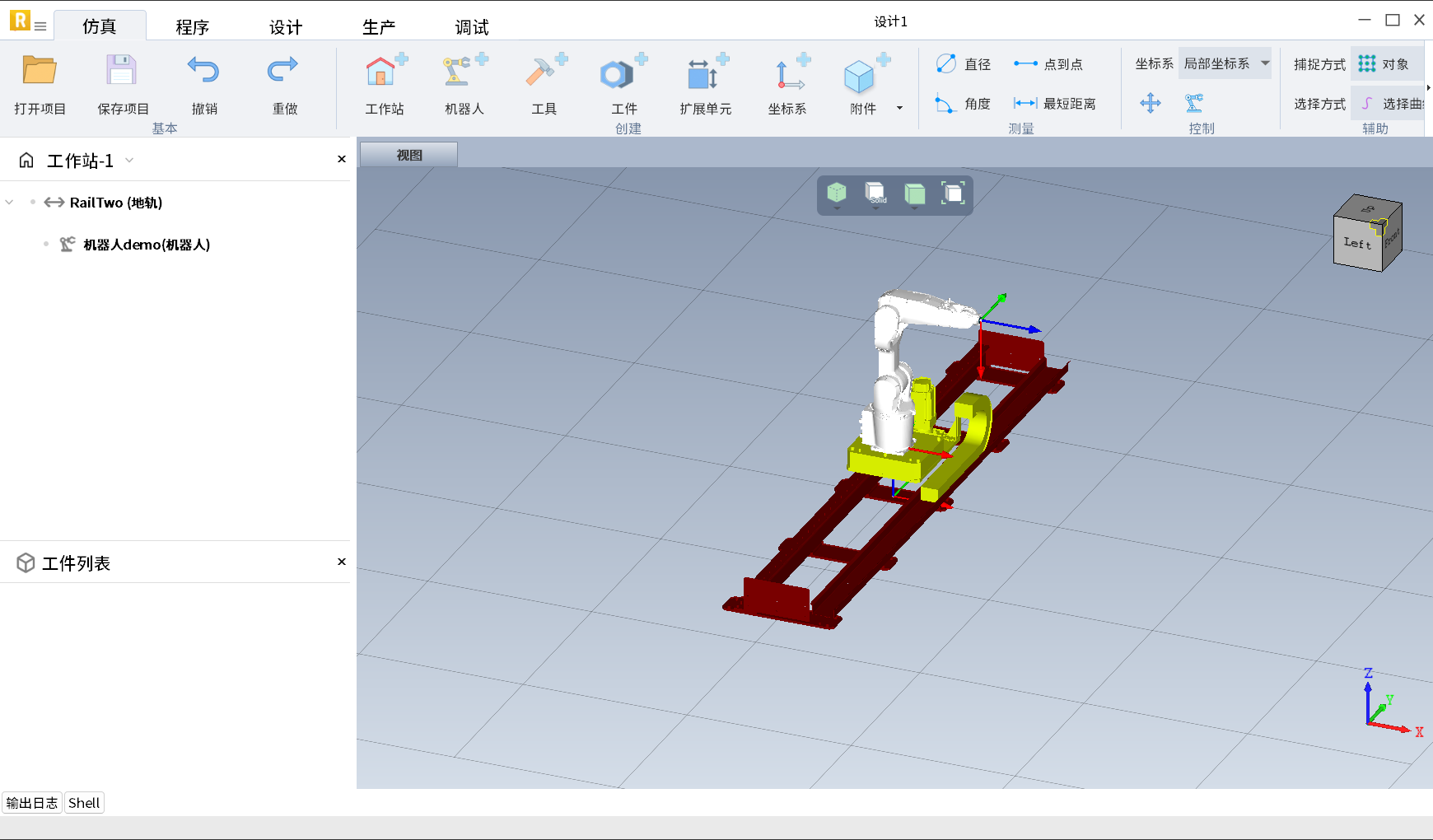
点击“安装”按钮后,“安装”按钮会变为“卸载”按钮如下图所示。 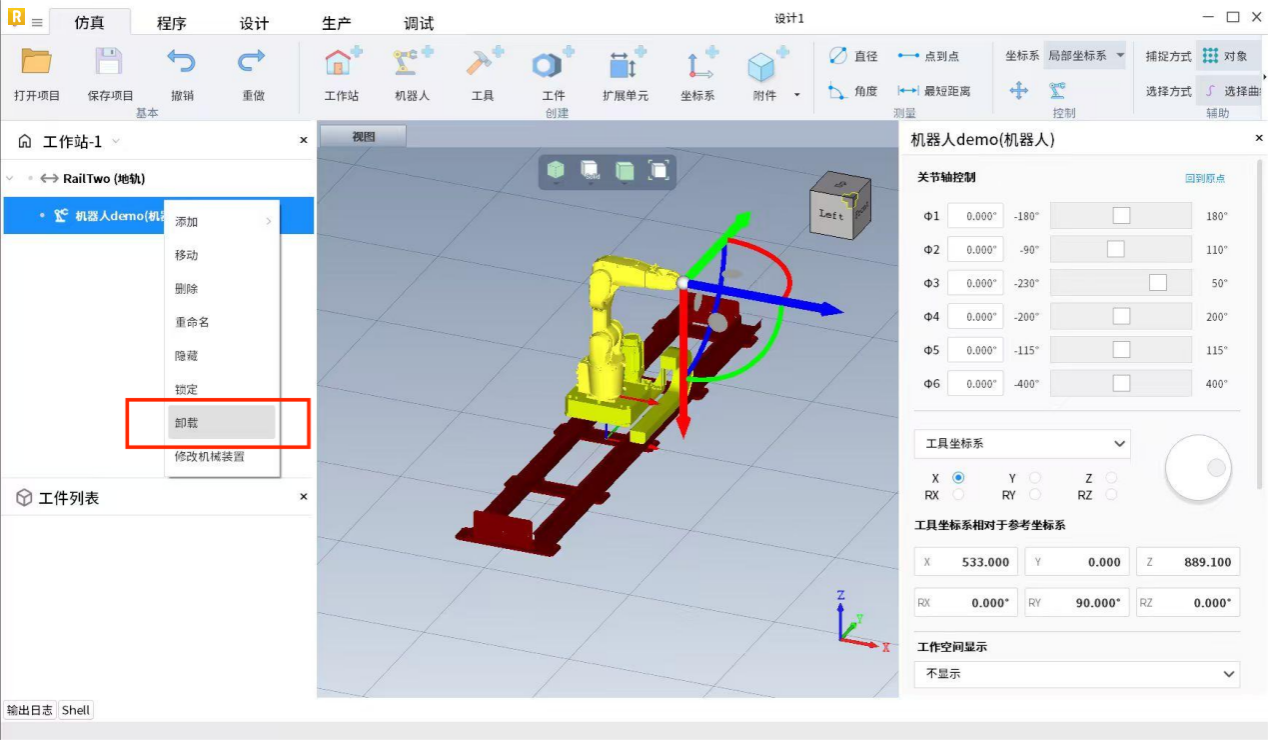
卸载之后如下所示,机器人不再安装在地轨上。 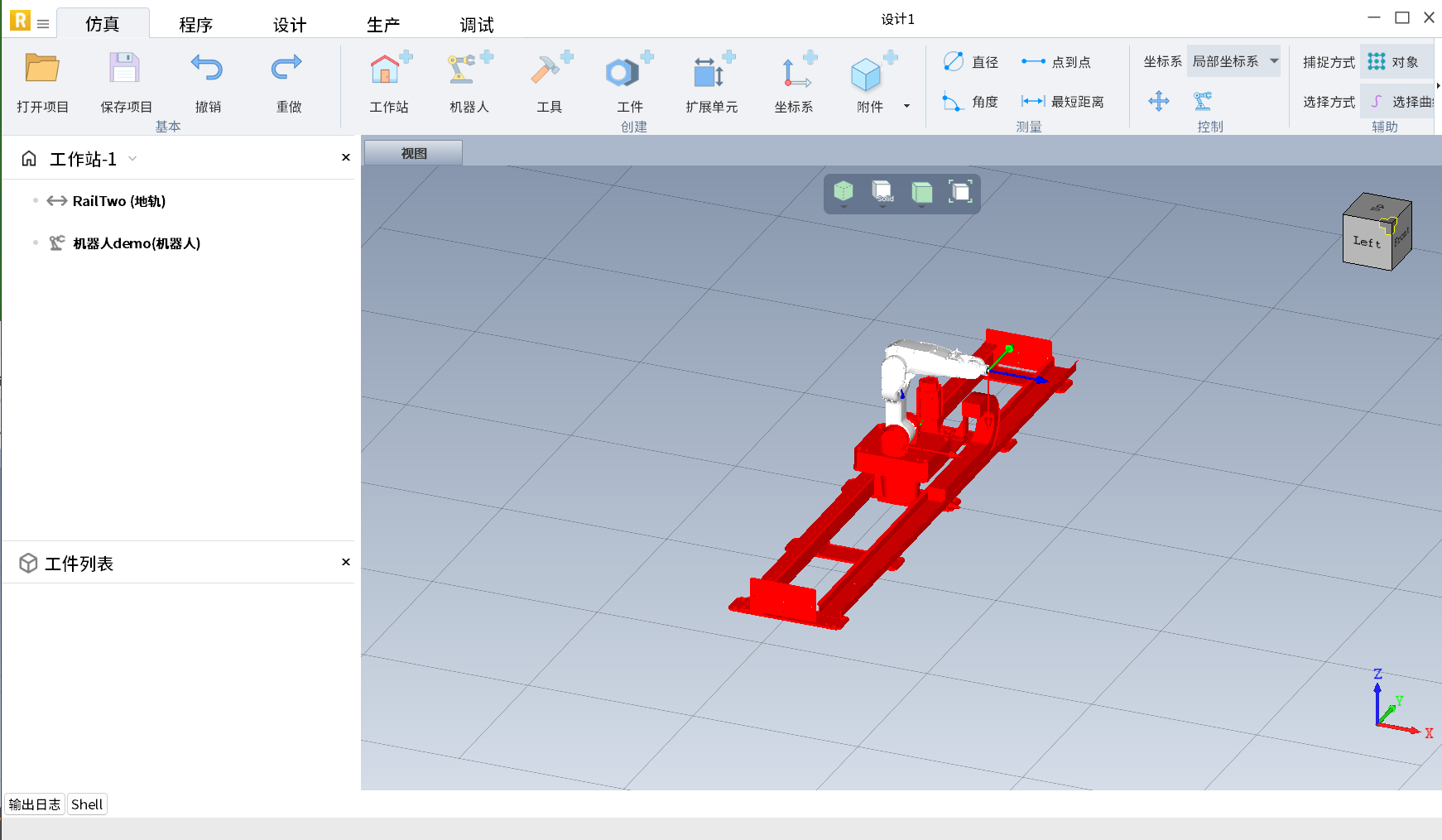
属性面板
点击左侧设备树中的机器人,弹出机器人属性面板,可在其中对机器人进行多轴控制。 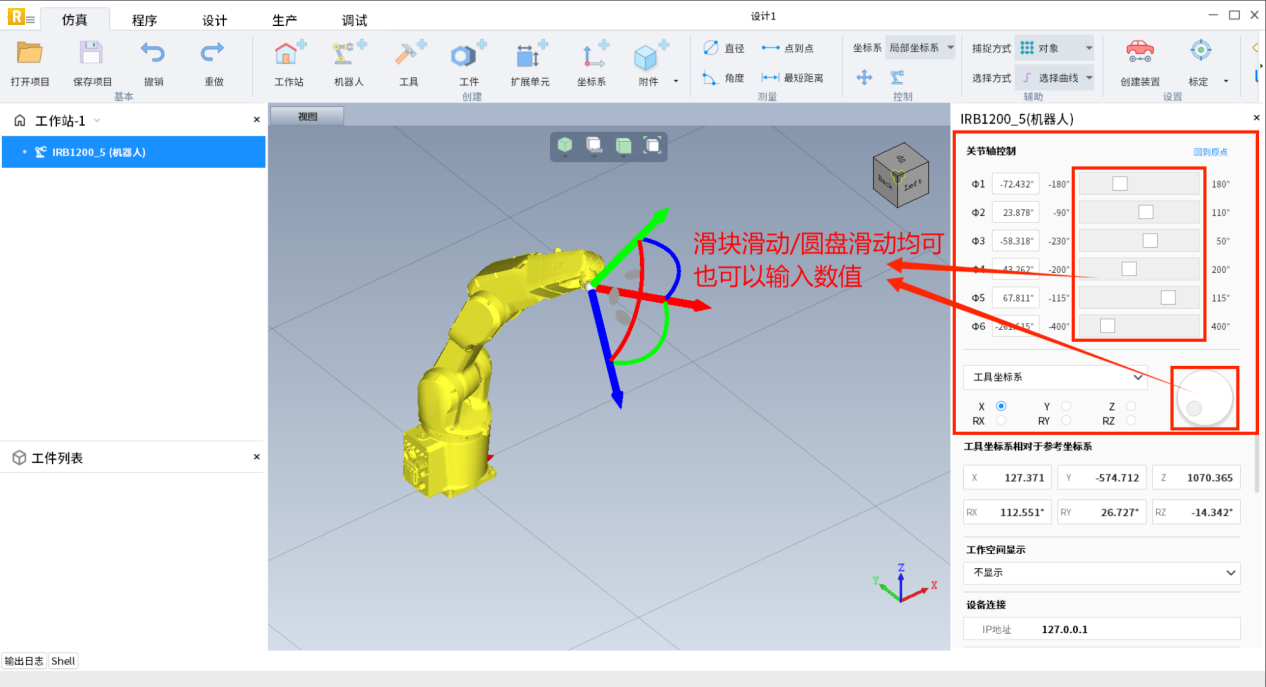
点击显示工作空间,图形视窗出现白色圆形表示工作空间范围。 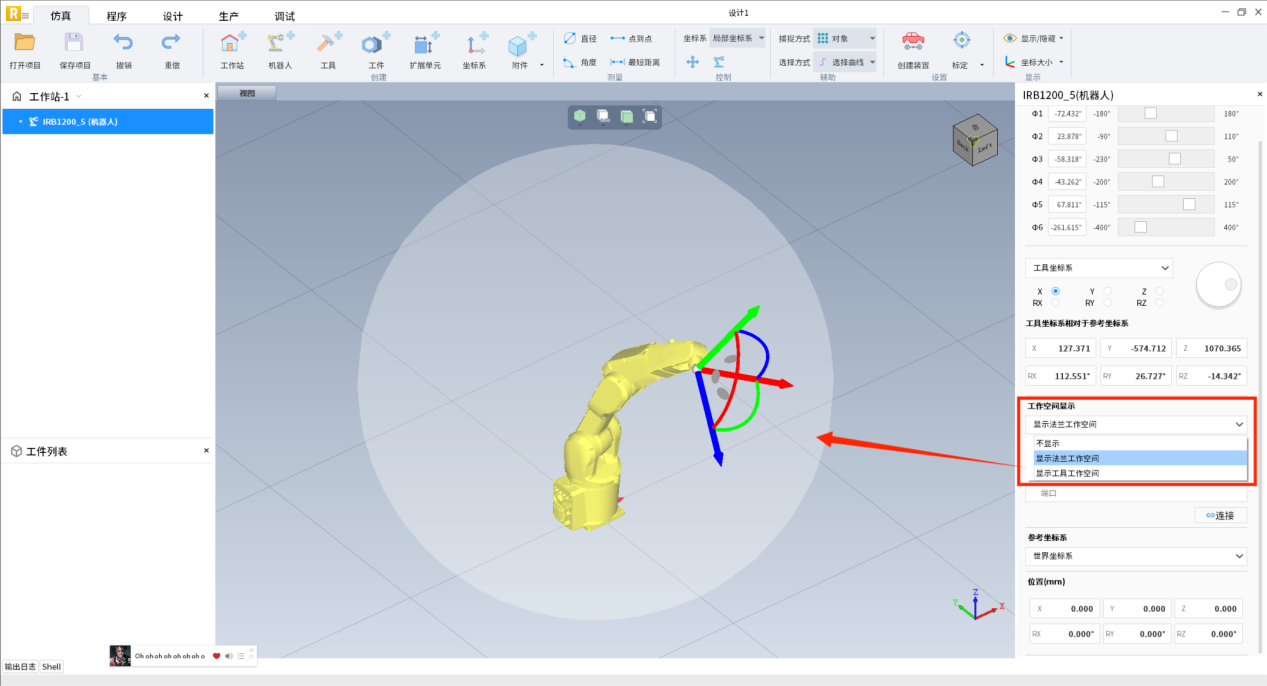
位置中可改变机器人相对于参考坐标系的位置。 改变前: 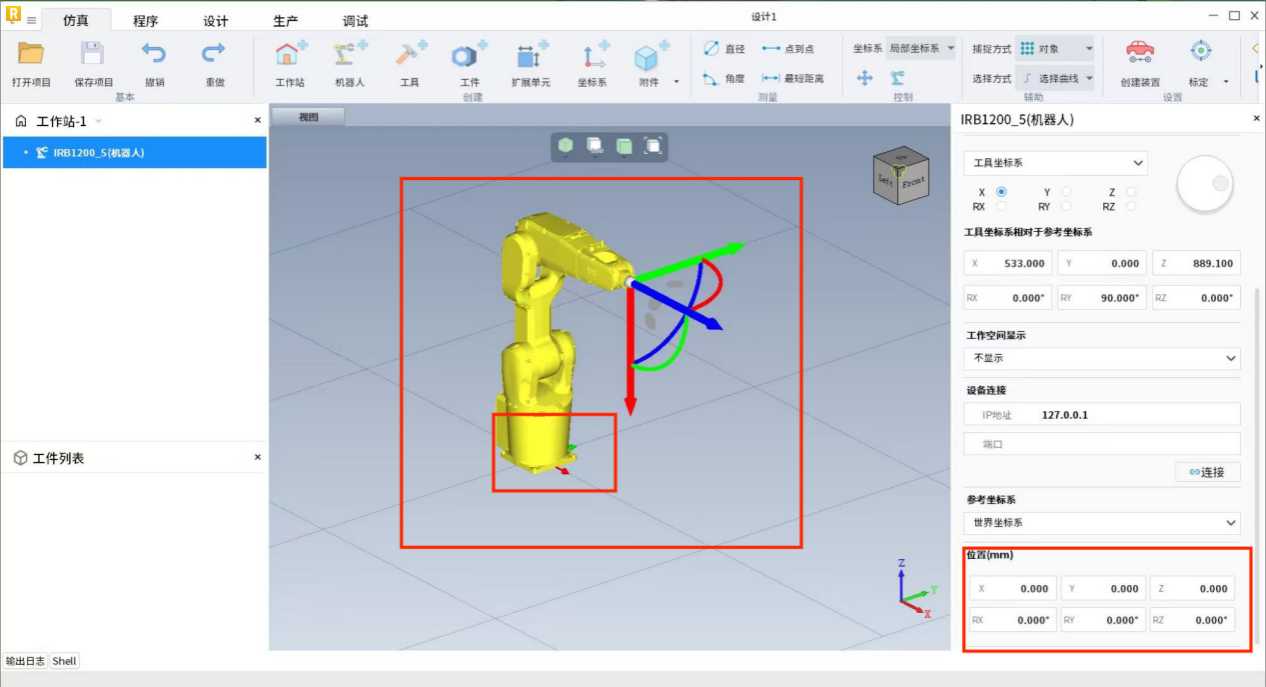
改变后: