外观
2.2.1导入设备到工作站
本次案例计划搭建的工作站需导入地轨、机器人、焊枪、相机、工件。
导入地轨
点击“+扩展单元”按钮,弹出添加扩展单元窗口。 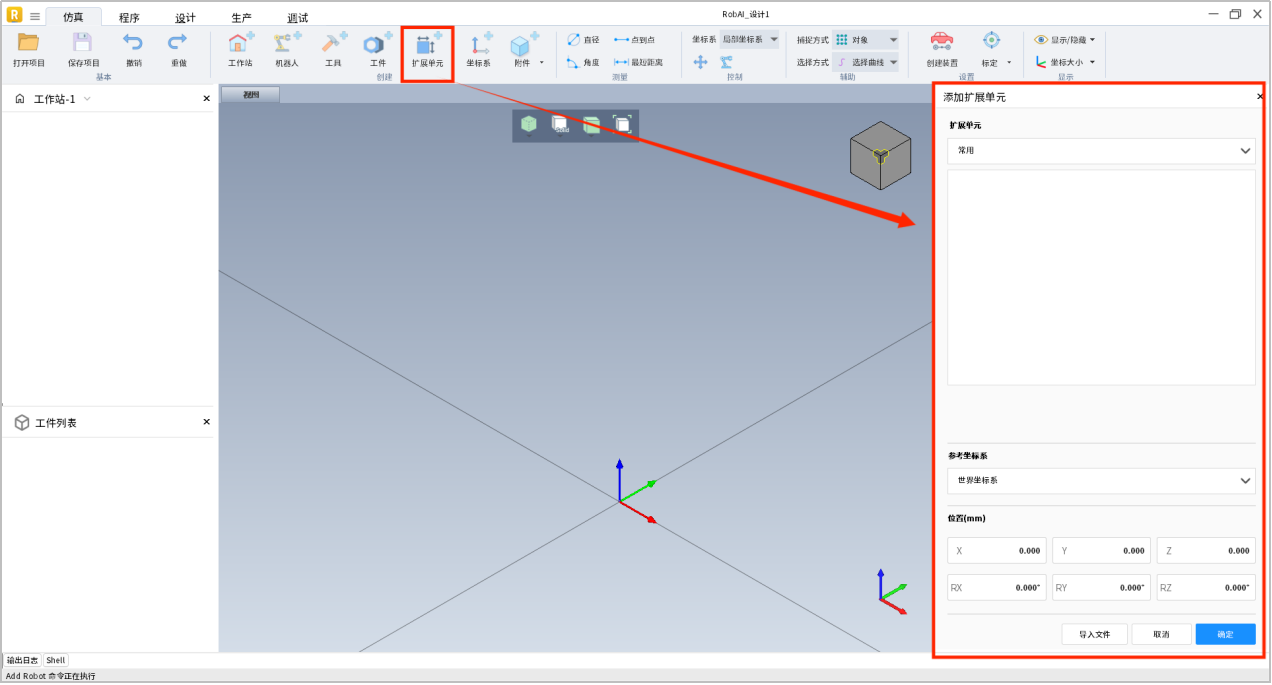 点击“导入文件”,选择地轨文件进行导入。
点击“导入文件”,选择地轨文件进行导入。 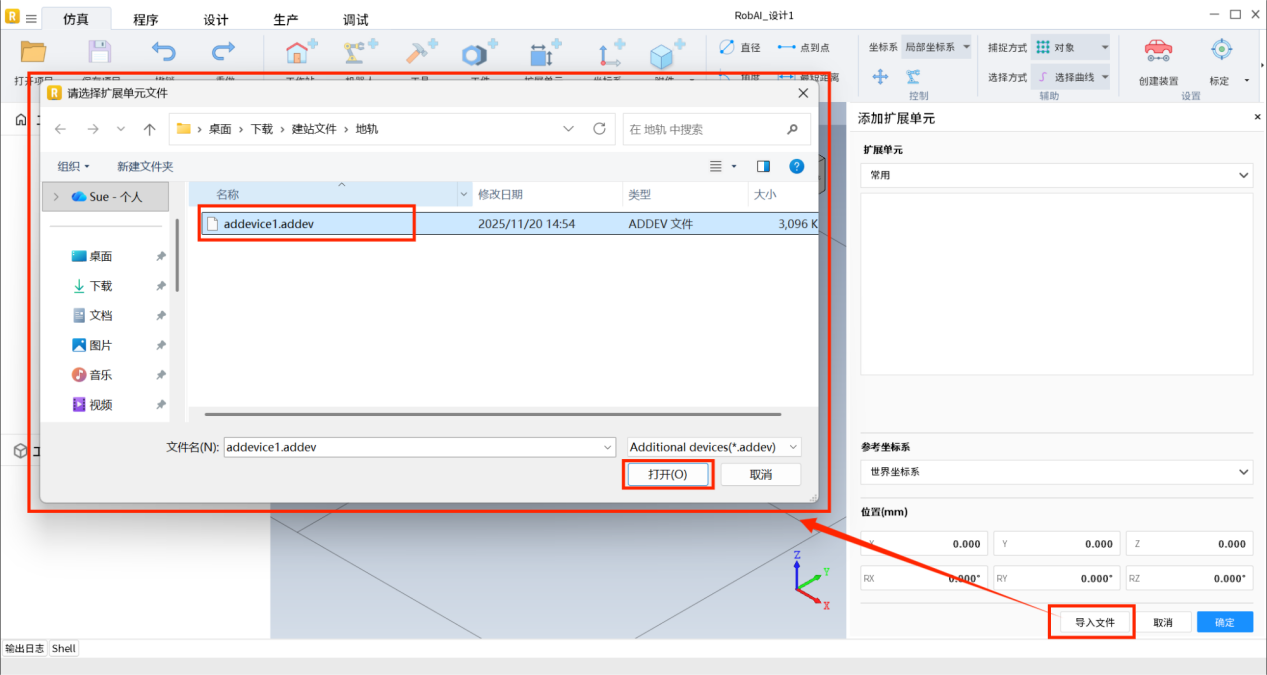
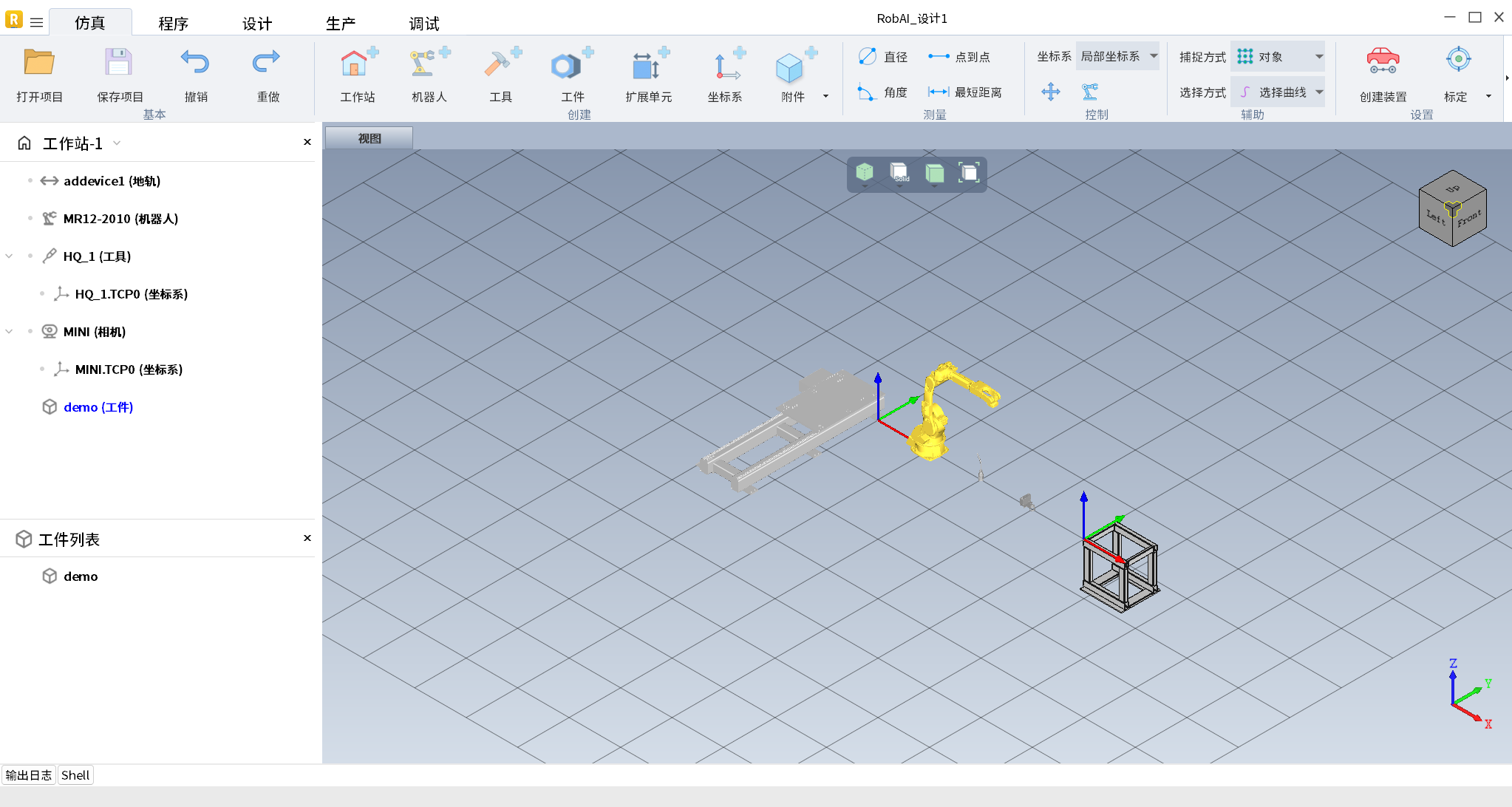
右侧面板会出现导入的自定义扩展单元的相关信息,点击“确认”完成添加。 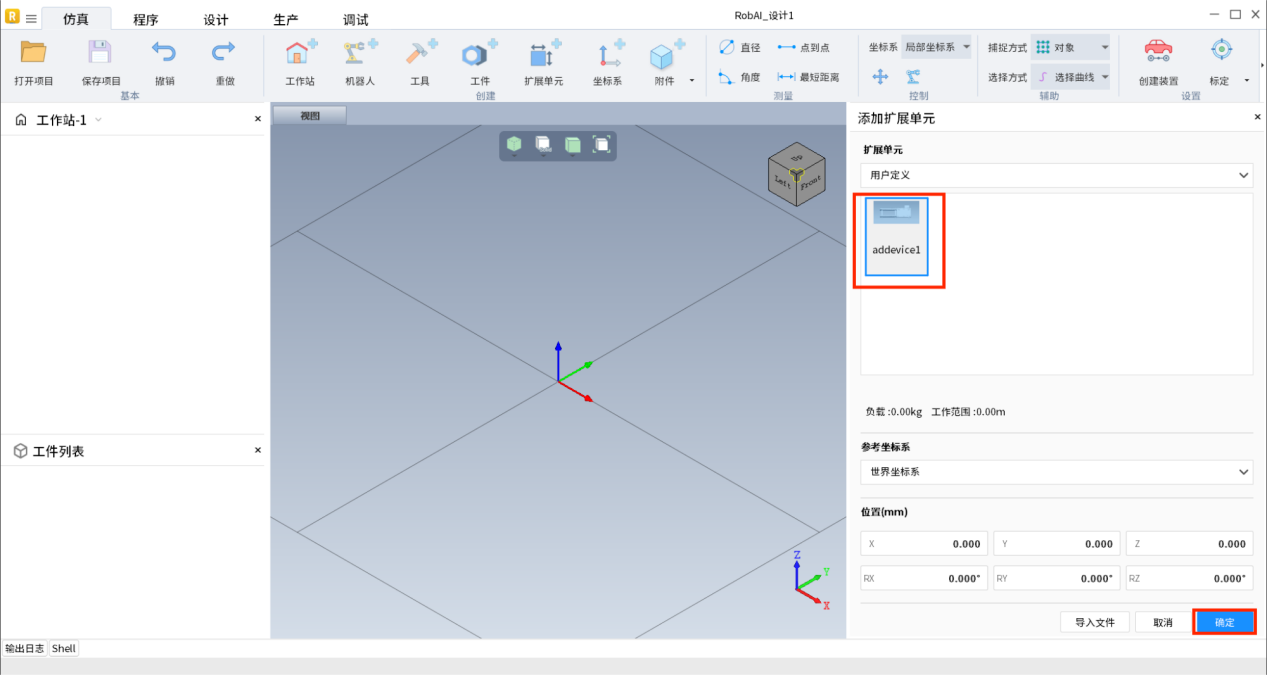 导入后的地轨如下图所示。
导入后的地轨如下图所示。 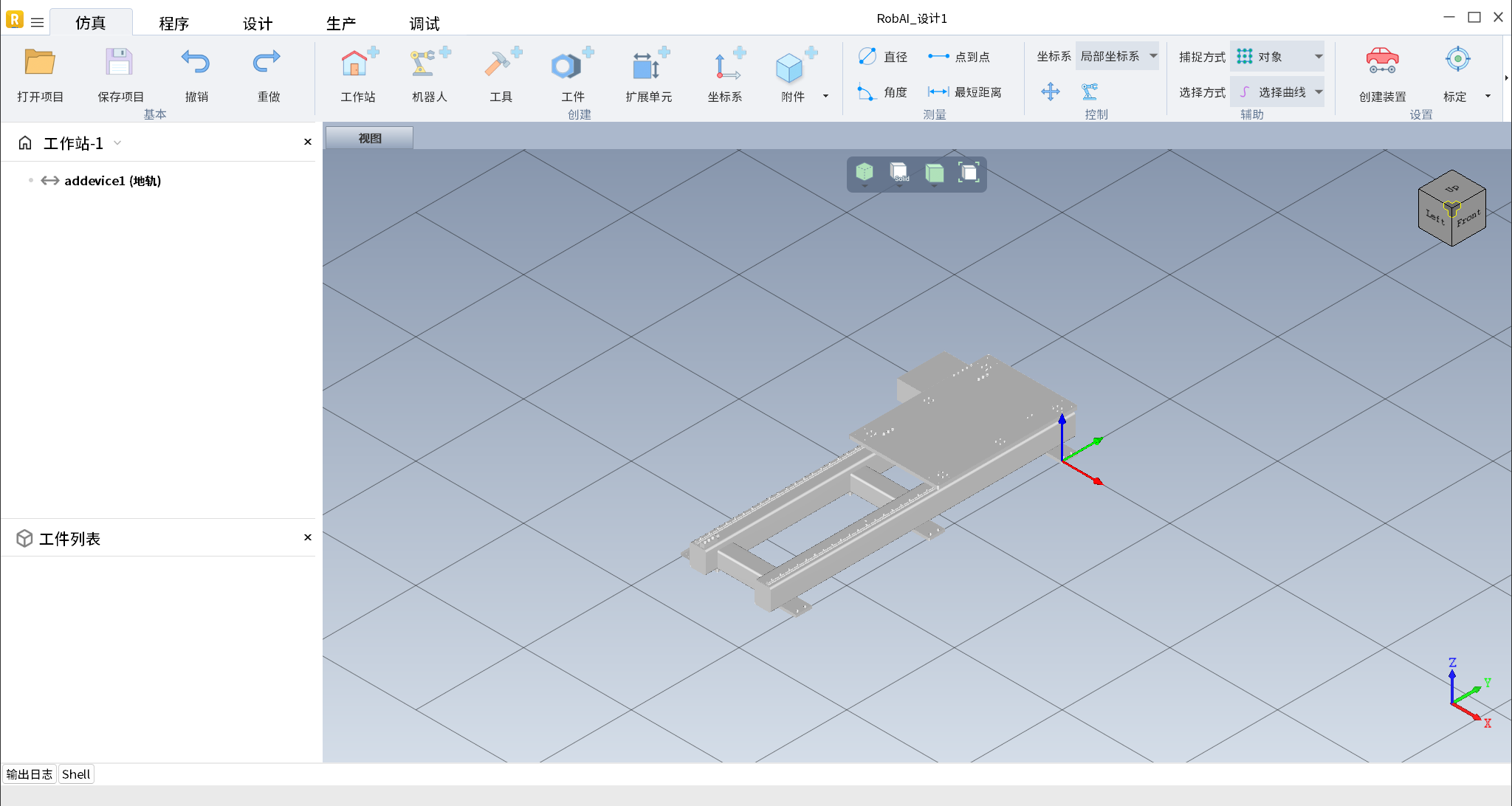
导入机器人
点击“+机器人”按钮,弹出添加机器人窗口。 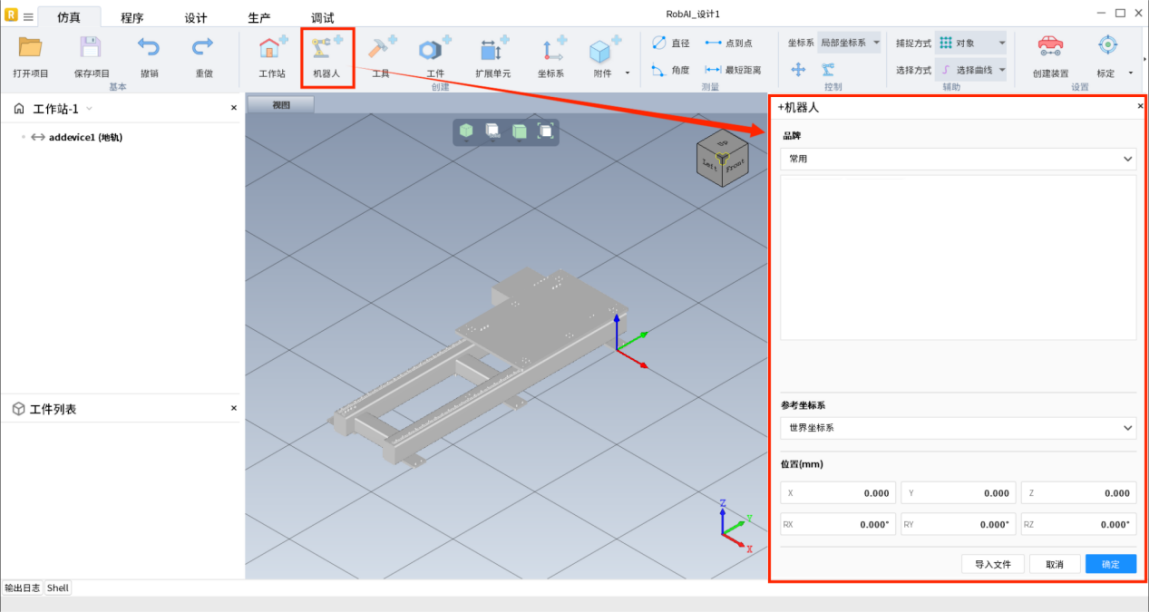
点击“导入文件”,选择机器人文件进行导入。 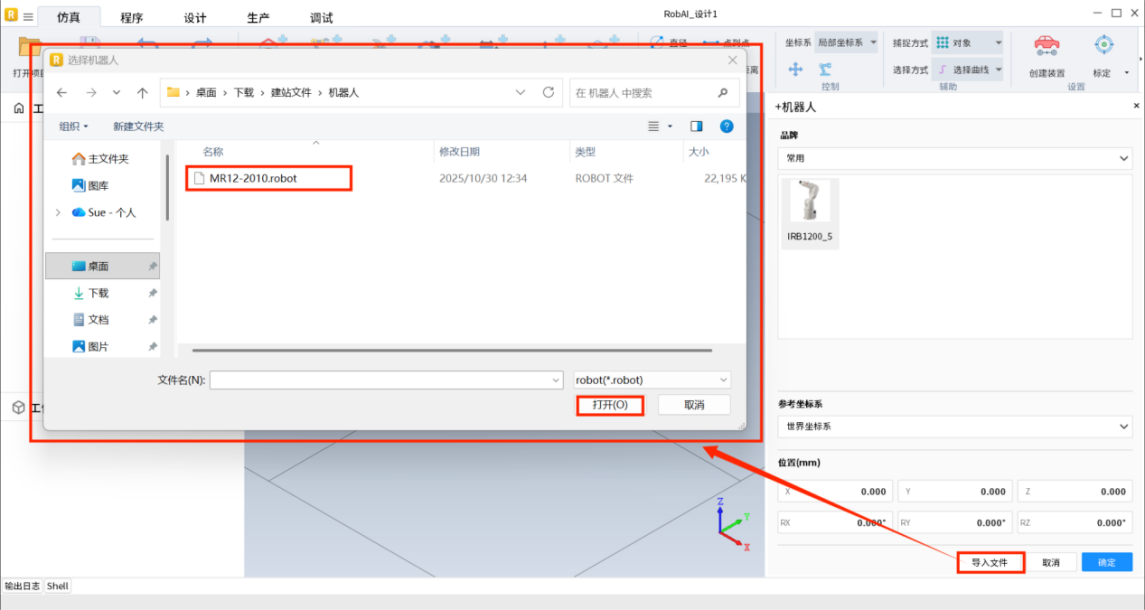 右侧面板会出现导入机器人的相关信息,为避免地轨与机器人在原点重合碰撞,将机器人位置X方向偏离原点1000mm,点击“确认”完成导入。
右侧面板会出现导入机器人的相关信息,为避免地轨与机器人在原点重合碰撞,将机器人位置X方向偏离原点1000mm,点击“确认”完成导入。 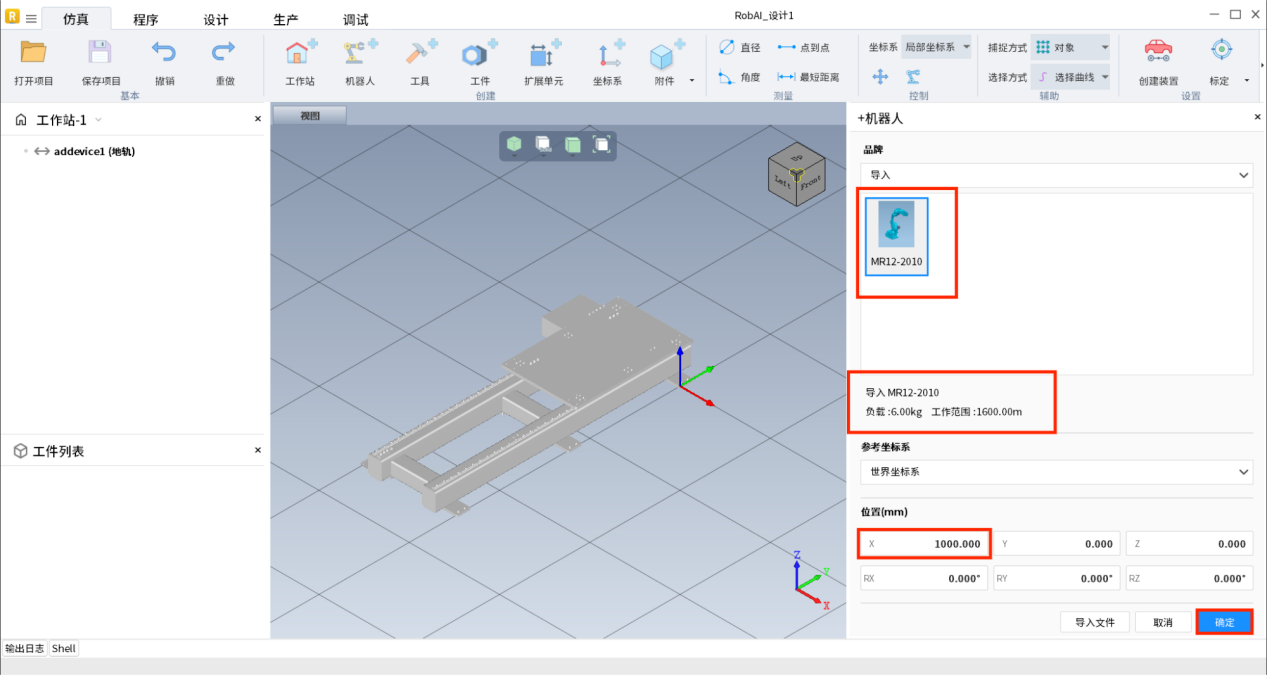 导入后的机器人如下图所示。
导入后的机器人如下图所示。 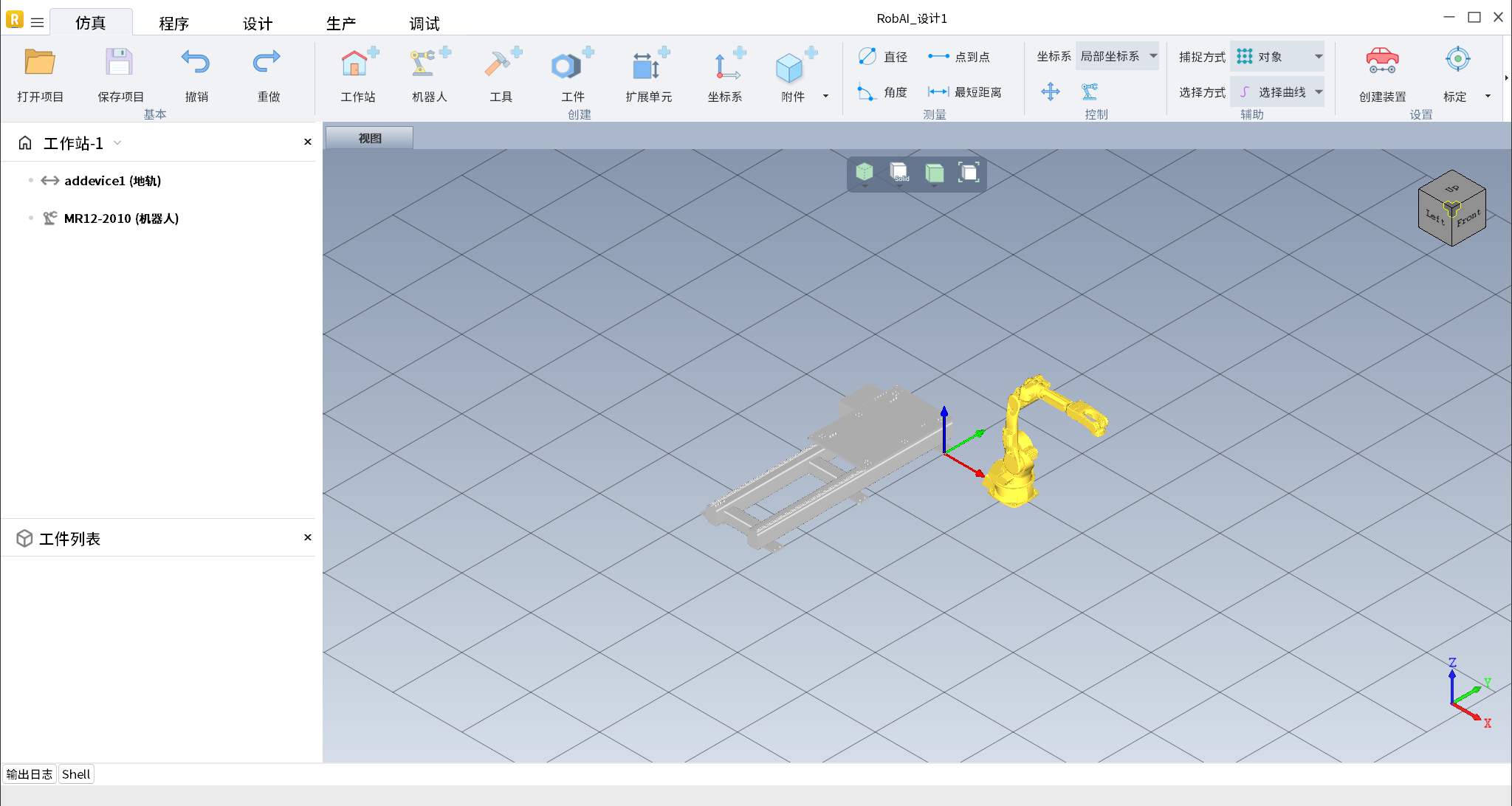
导入焊枪
点击“+工具”按钮,弹出添加工具窗口。 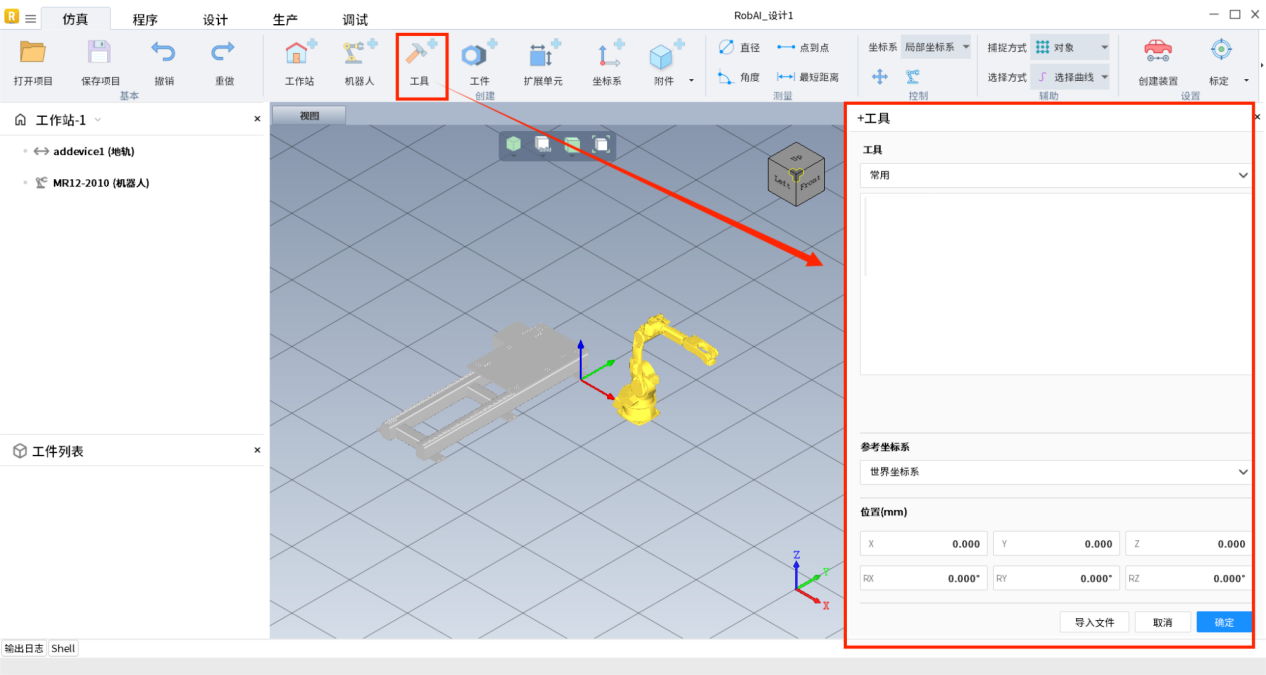 点击“导入文件”,选择焊枪文件进行导入。
点击“导入文件”,选择焊枪文件进行导入。 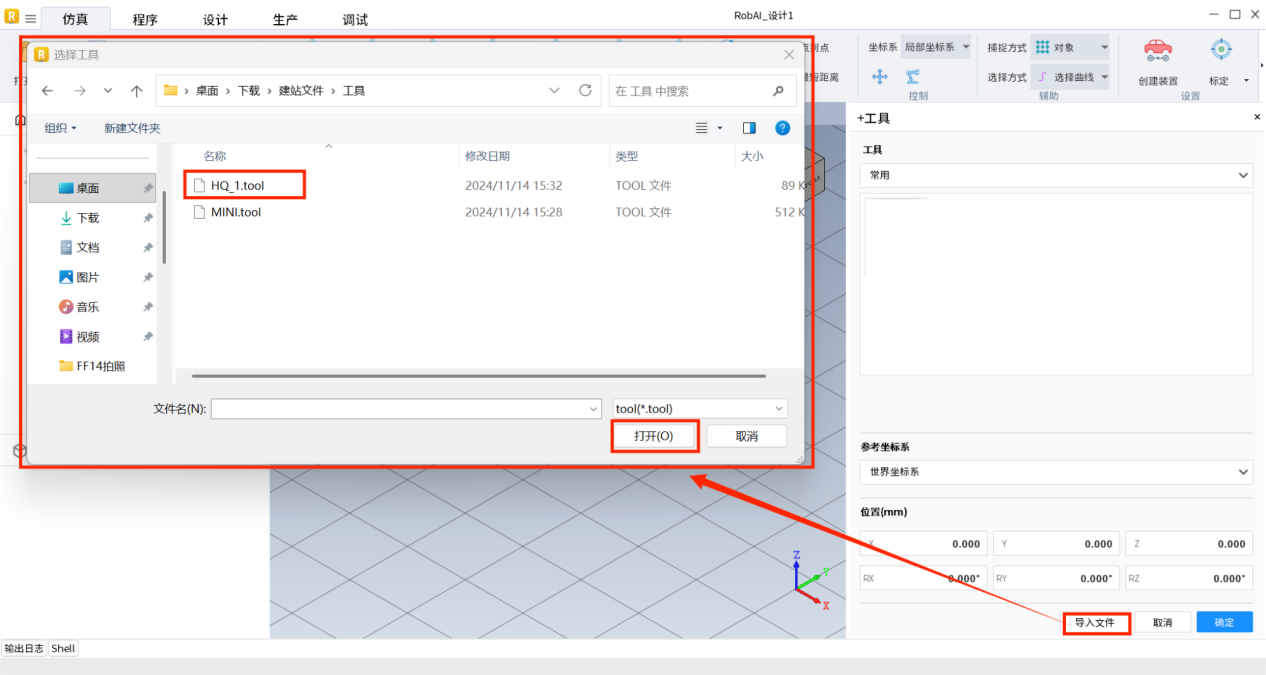 右侧面板会出现导入工具的相关信息,为避免地轨与焊枪在原点重合碰撞,将机器人位置X方向偏离原点2000mm,点击“确认”完成导入。
右侧面板会出现导入工具的相关信息,为避免地轨与焊枪在原点重合碰撞,将机器人位置X方向偏离原点2000mm,点击“确认”完成导入。 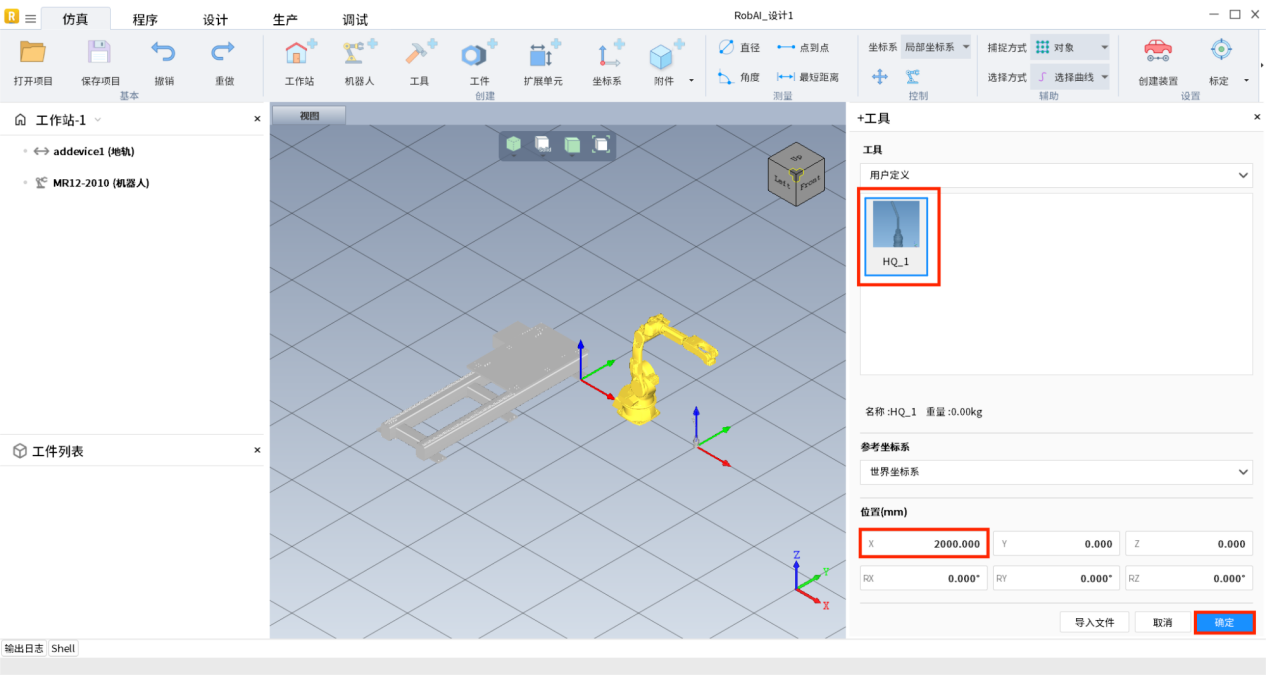 导入后的焊枪如下图所示。
导入后的焊枪如下图所示。 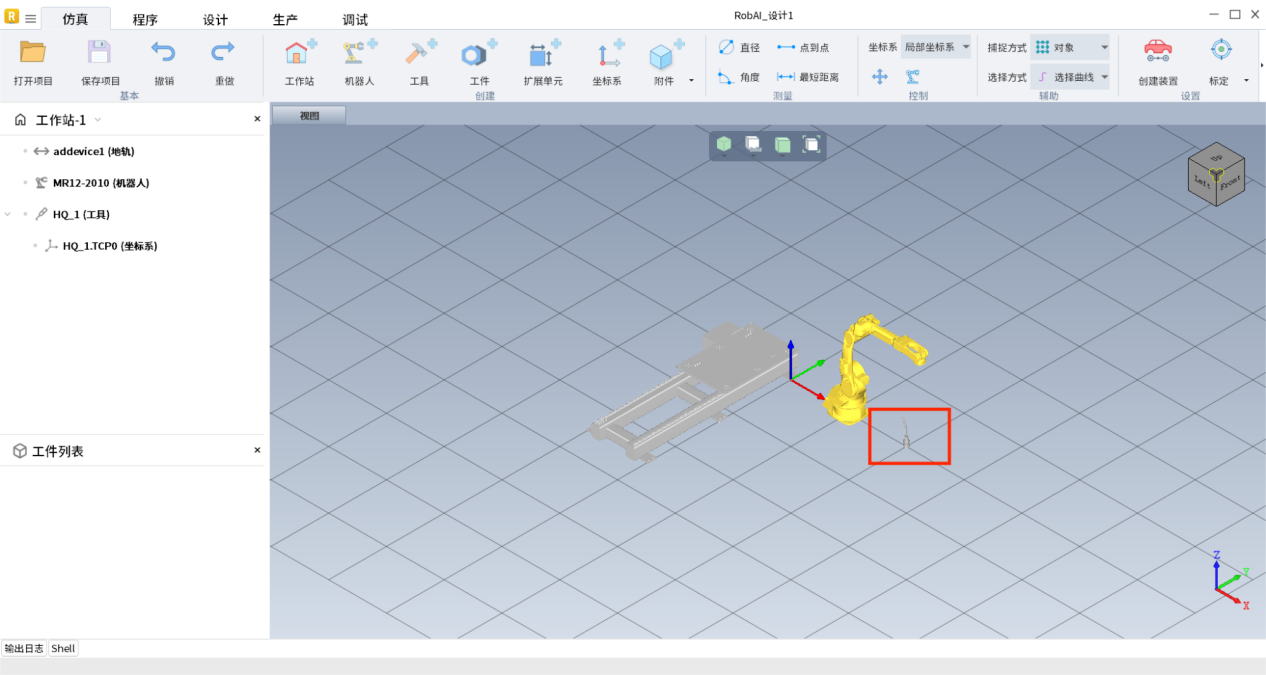
导入相机
点击“+工具”按钮,弹出添加工具窗口。 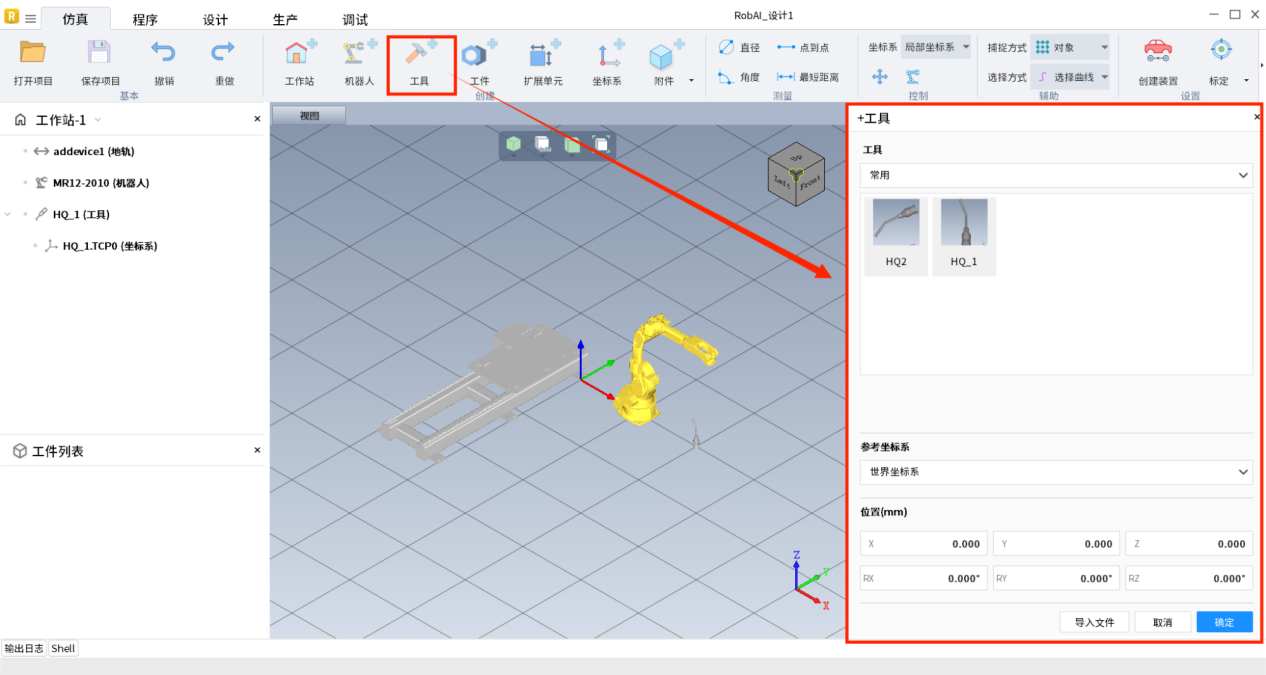 点击“导入文件”,选择相机文件进行导入。
点击“导入文件”,选择相机文件进行导入。 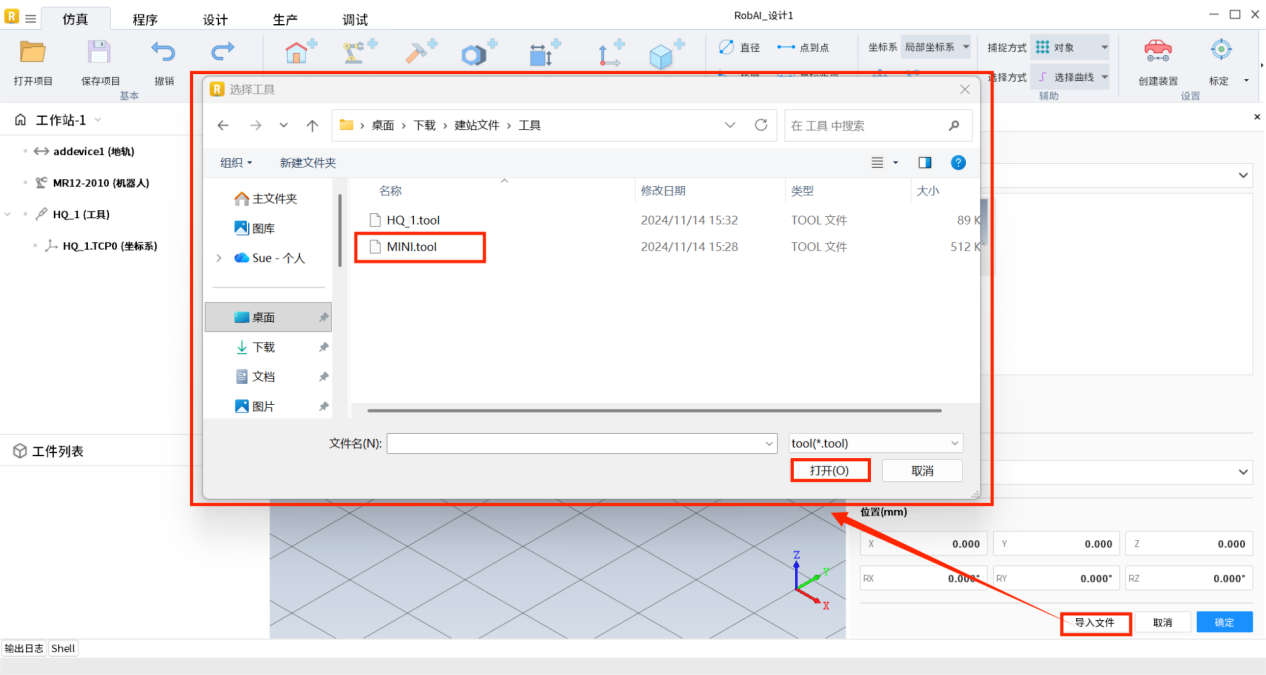 右侧面板会出现导入工具的相关信息,为避免地轨与相机在原点重合碰撞,将机器人位置X方向偏离原点3000mm,点击“确认”完成导入。
右侧面板会出现导入工具的相关信息,为避免地轨与相机在原点重合碰撞,将机器人位置X方向偏离原点3000mm,点击“确认”完成导入。 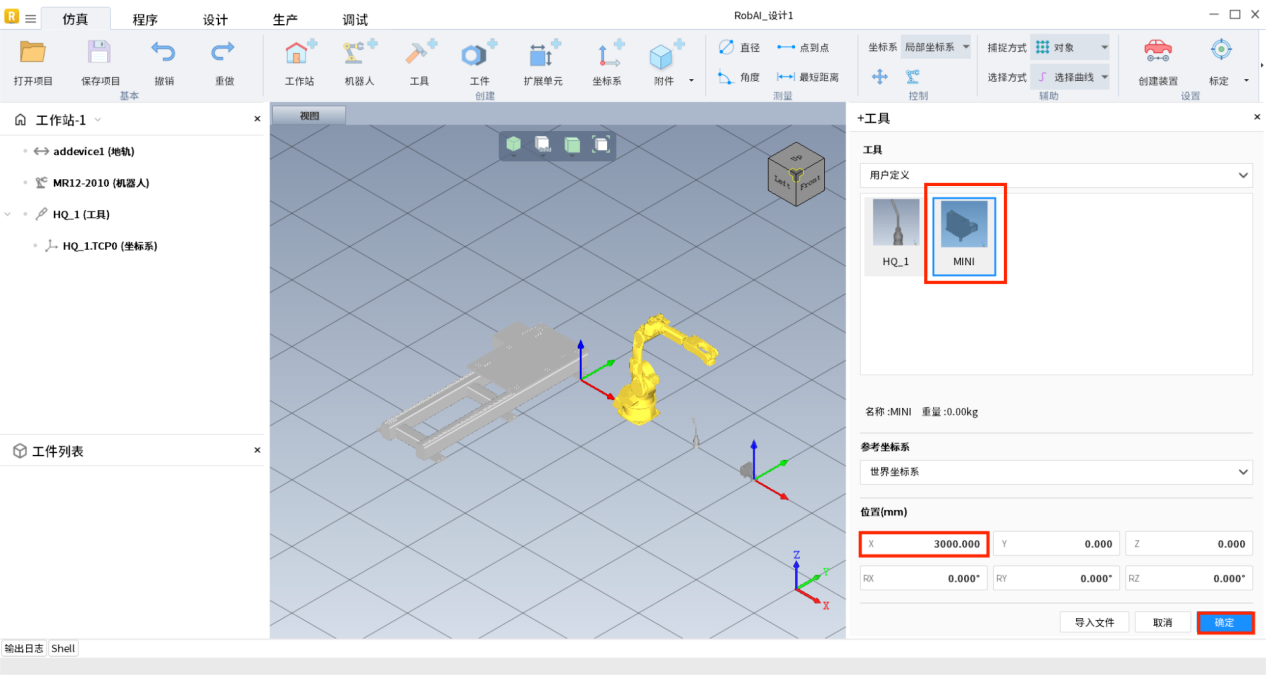 导入后的相机如下图所示。
导入后的相机如下图所示。 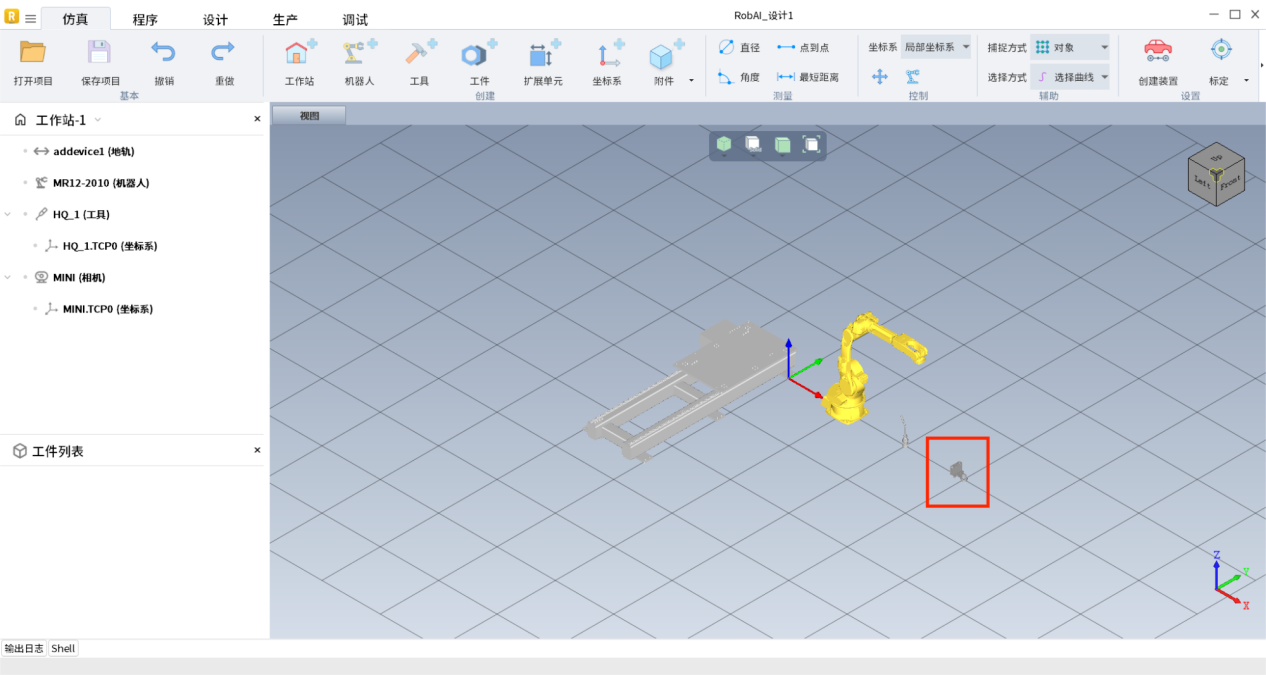
导入工件
在菜单栏中点击“+工件”按钮,弹出文件栏,选择需要的工件文件点击打开。 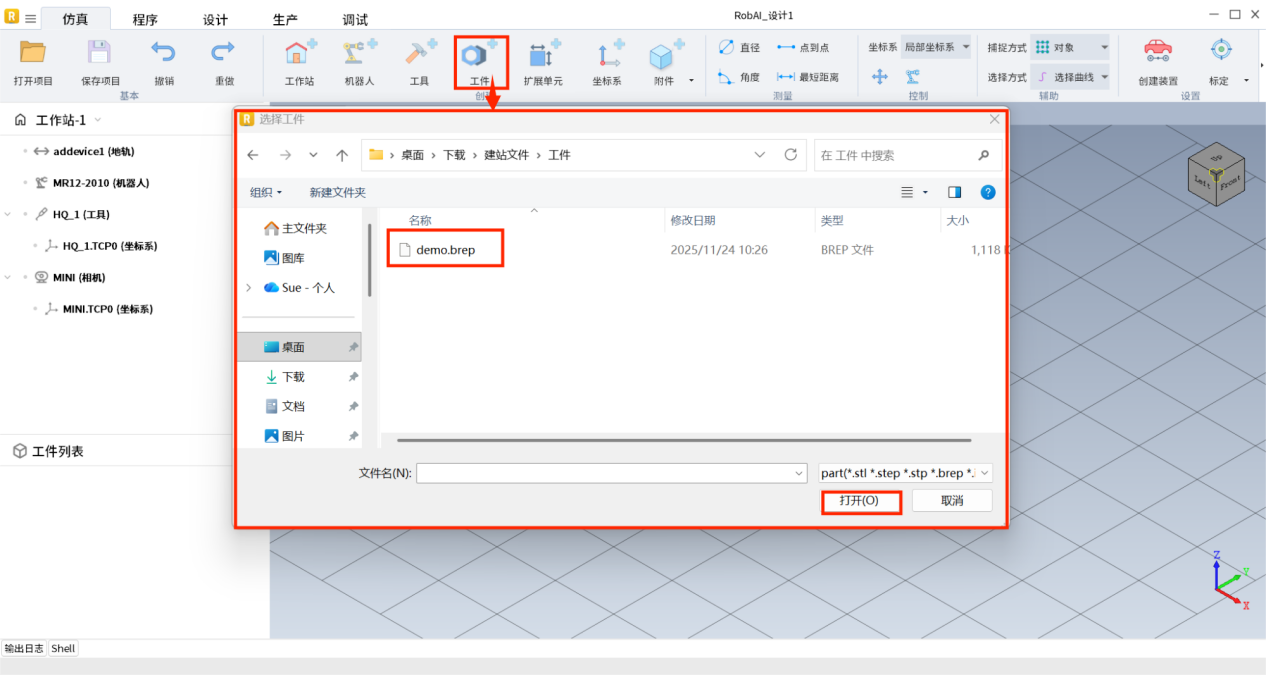 打开成功后,弹出导入工件面板。为避免地轨与工件在原点重合碰撞,将机器人位置X方向偏离原点4000mm,点击“确认”完成导入。
打开成功后,弹出导入工件面板。为避免地轨与工件在原点重合碰撞,将机器人位置X方向偏离原点4000mm,点击“确认”完成导入。 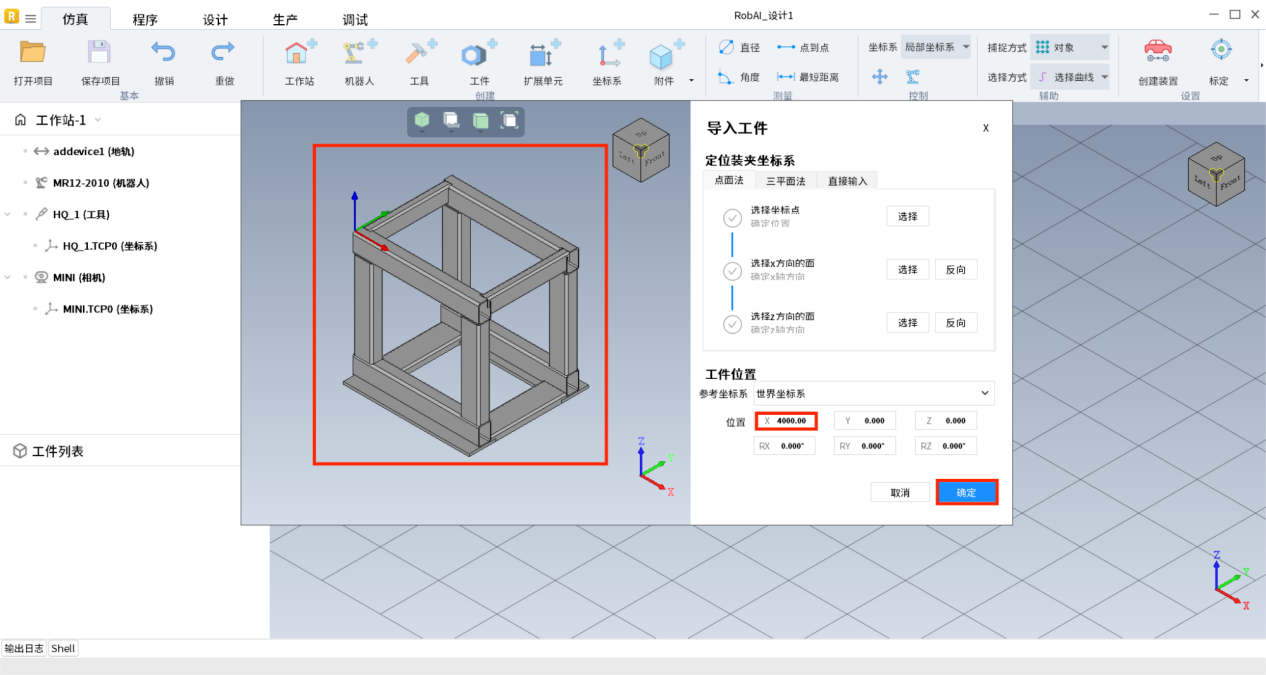 击确认,导入工件成功,如下图所示。
击确认,导入工件成功,如下图所示。