外观
2.1.4工件
点击“+工件”按钮,弹出文件栏,选择需要的工件,点击打开。本案例选用工件wp。 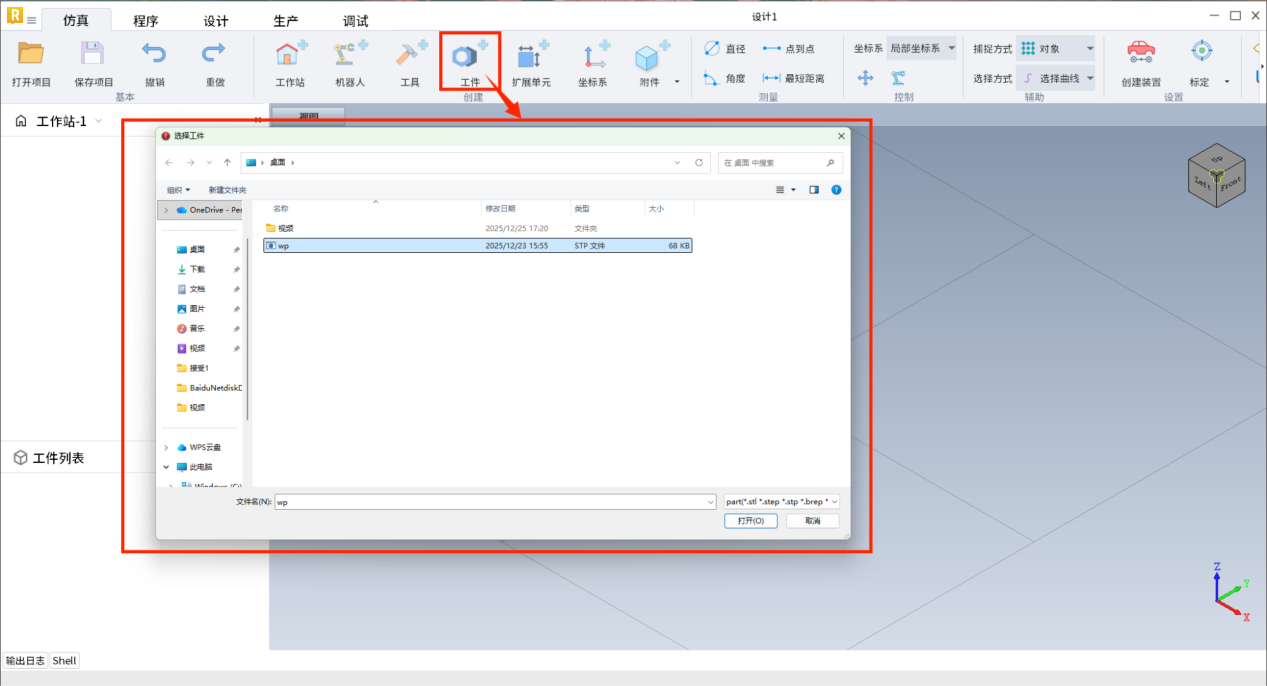 打开成功后,弹出导入工件面板。可通过点面法、三平面法、直接输入等方式定义装夹坐标系。 可改变工件参考坐标系,鼠标滑动数字或直接输入均可改变工件对于参考坐标系的位置。
打开成功后,弹出导入工件面板。可通过点面法、三平面法、直接输入等方式定义装夹坐标系。 可改变工件参考坐标系,鼠标滑动数字或直接输入均可改变工件对于参考坐标系的位置。 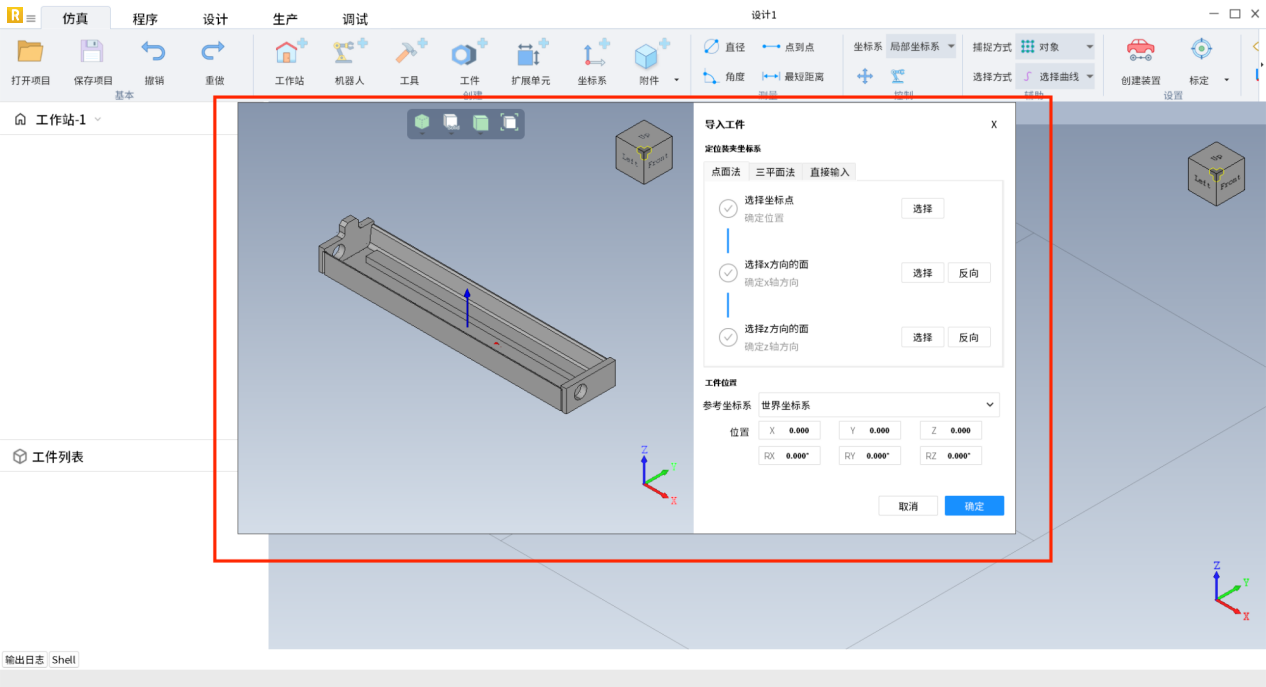
直接点击确定,添加成功。装夹坐标系即与世界坐标系重合,在原点。 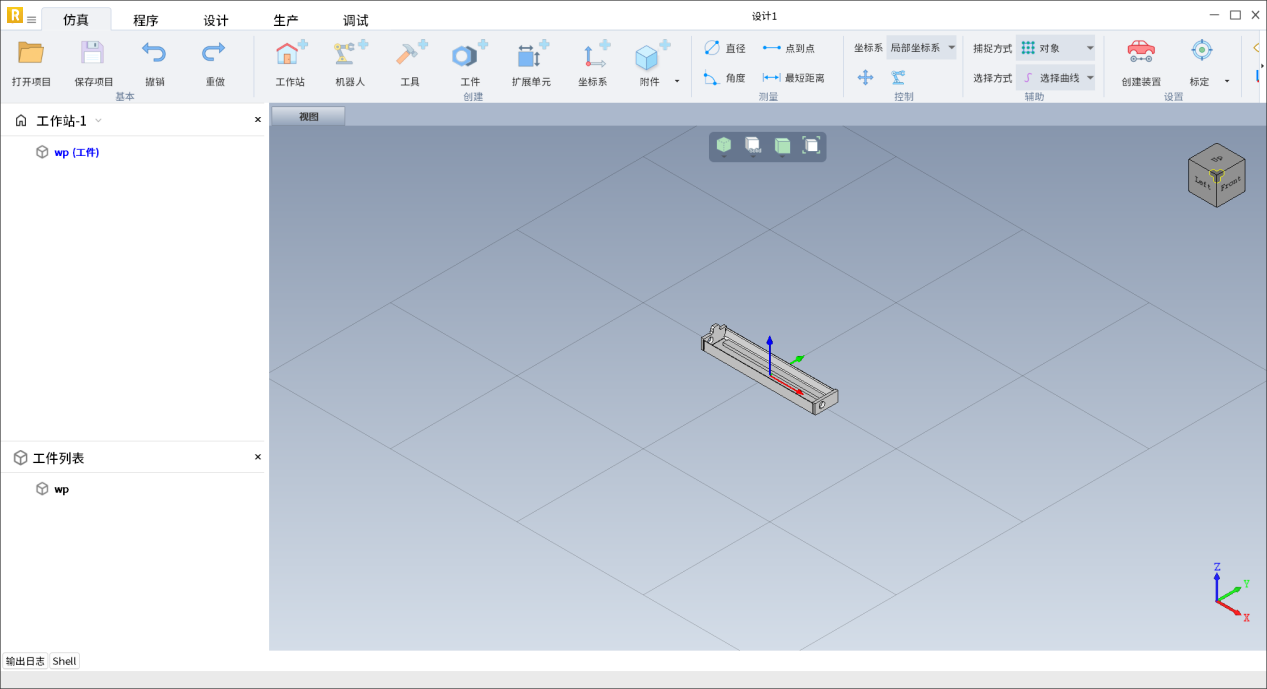
基础操作
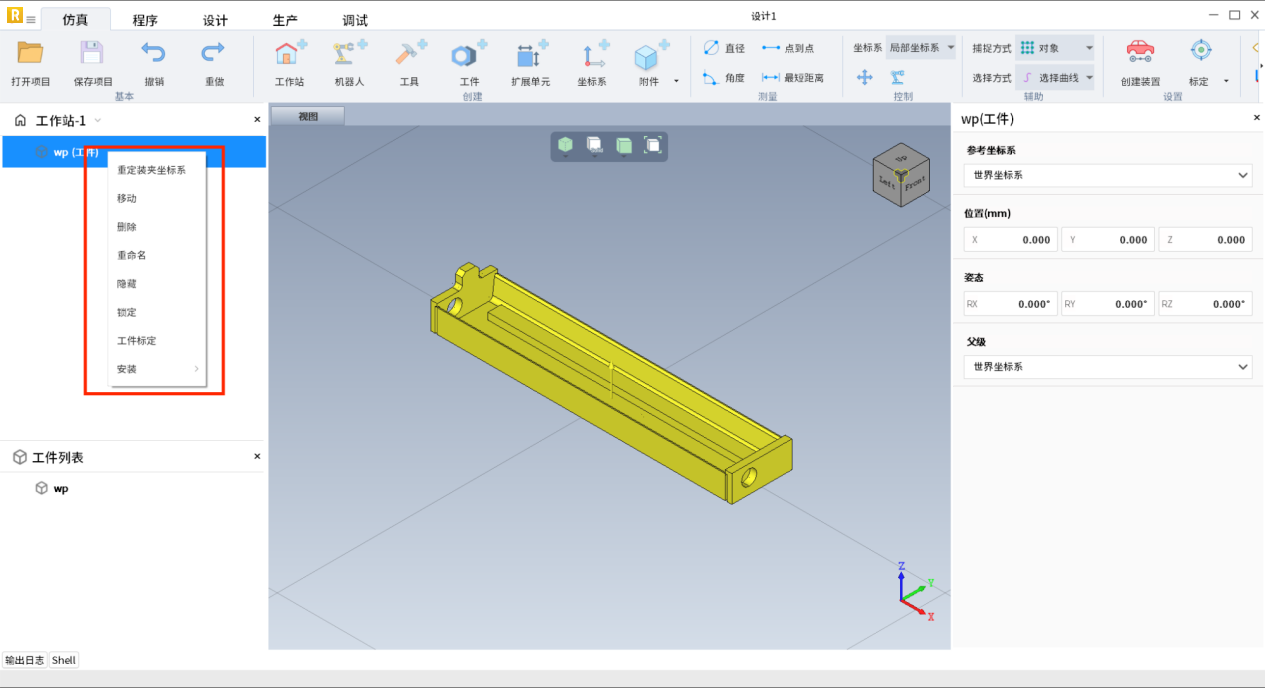 鼠标右键点击左侧设备树中的工件,出现命令栏,可进行相应操作。
鼠标右键点击左侧设备树中的工件,出现命令栏,可进行相应操作。
| 命令 | 功能 |
|---|---|
| 重定装夹坐标系 | 对其装夹坐标系进行重设。 重建方法有点面法、三平面法和直接输入三种 |
| 移动 | 移动工件位置 |
| 删除 | 将此对象从图形视窗和设备树节点删除 |
| 重命名 | 重命名此对象 |
| 隐藏(显示) | 隐藏当前选中对象 |
| 锁定(解锁) | 无法通过视图选中该对象 |
| 安装(卸载) | 将当前工件安装在其他对象上 |
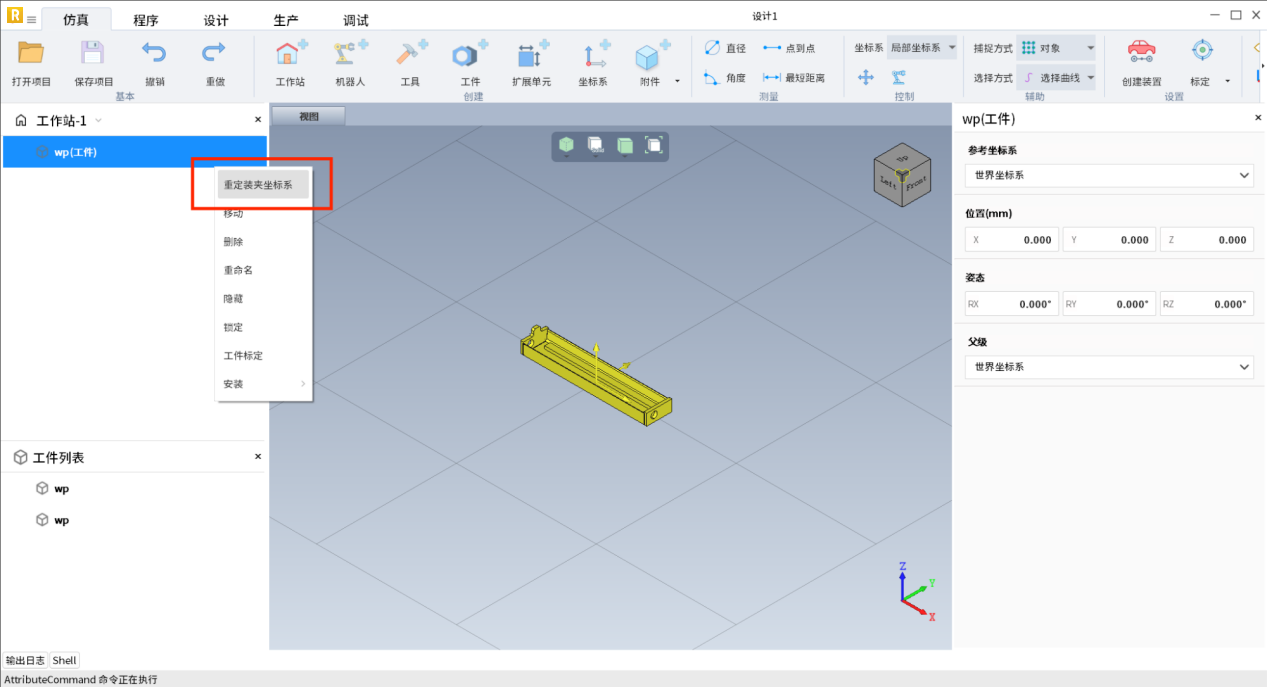
重定装夹坐标系
若默认的工件装夹坐标系在当前场景中不适用,可用以下三种方法重定义工件在装夹坐标系。(ps以上述导入的工件wp为案例,工件装夹坐标系即与世界坐标系重合,在原点。重设的只是它在工件上的位置,在整个物理空间中,工件装夹坐标系依旧在原点并未改变)
①点面法
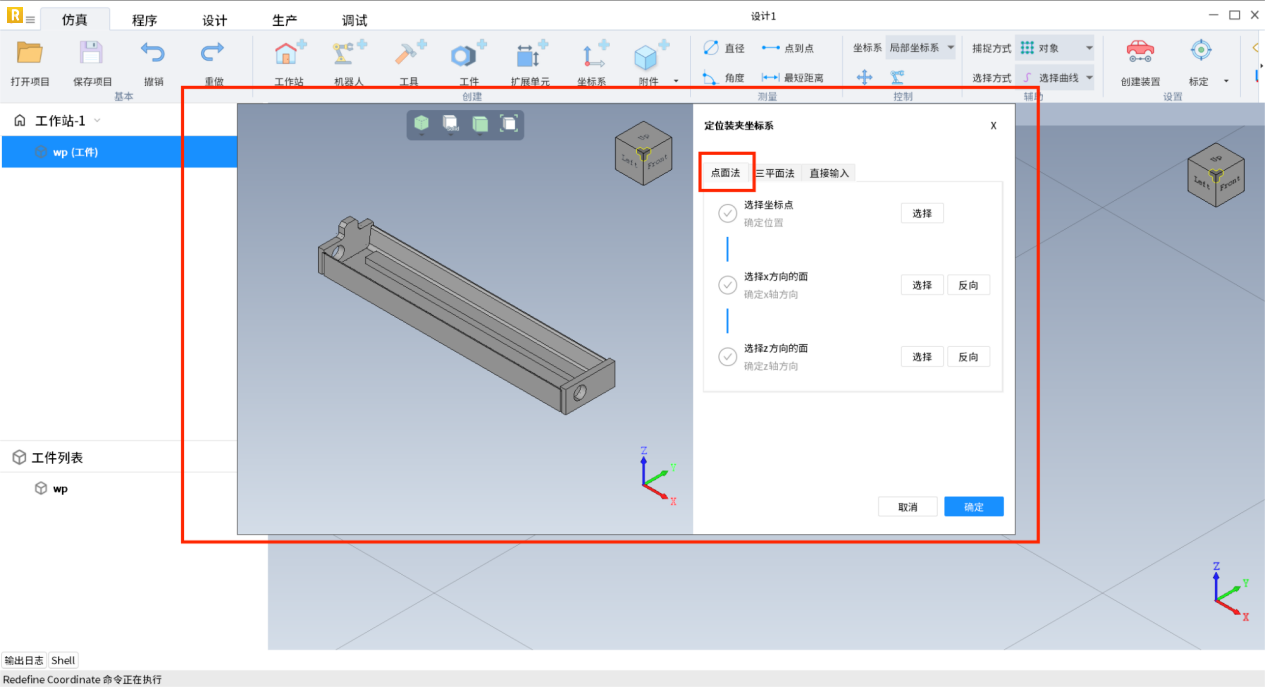 先选一个点
先选一个点 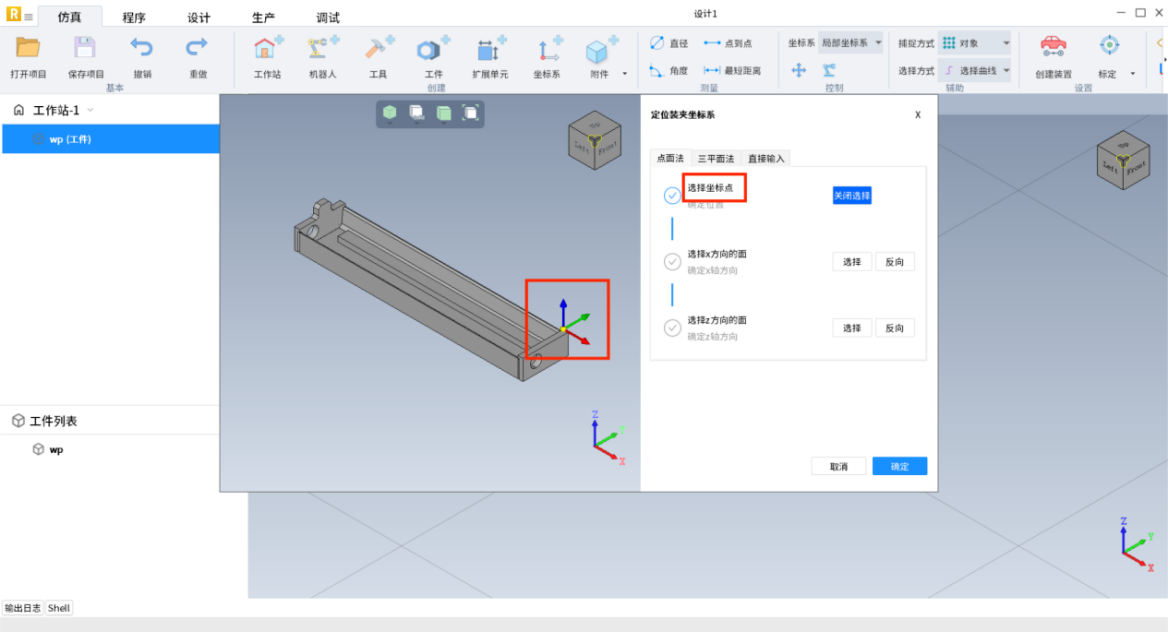 再选两个面
再选两个面 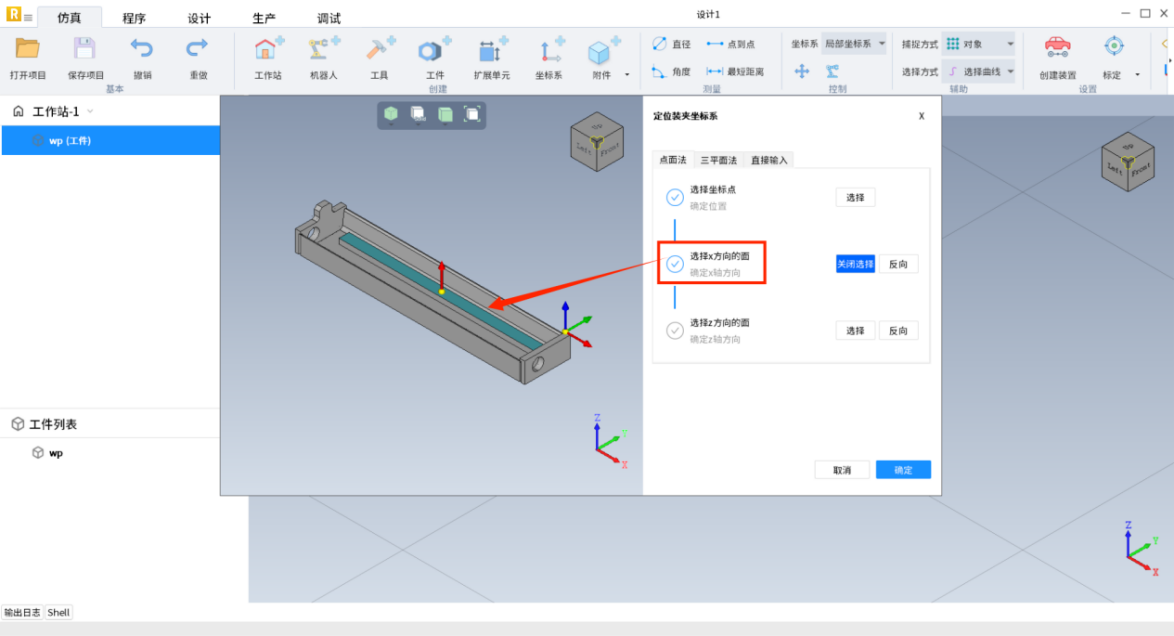
更改后: 
②三平面法
对下图工件重定义坐标系。  选择一个面,其垂直方向即为Z轴。蓝色箭头为Z方向,箭头朝前。需要将方向朝后,右侧边框中点击反向即可。
选择一个面,其垂直方向即为Z轴。蓝色箭头为Z方向,箭头朝前。需要将方向朝后,右侧边框中点击反向即可。 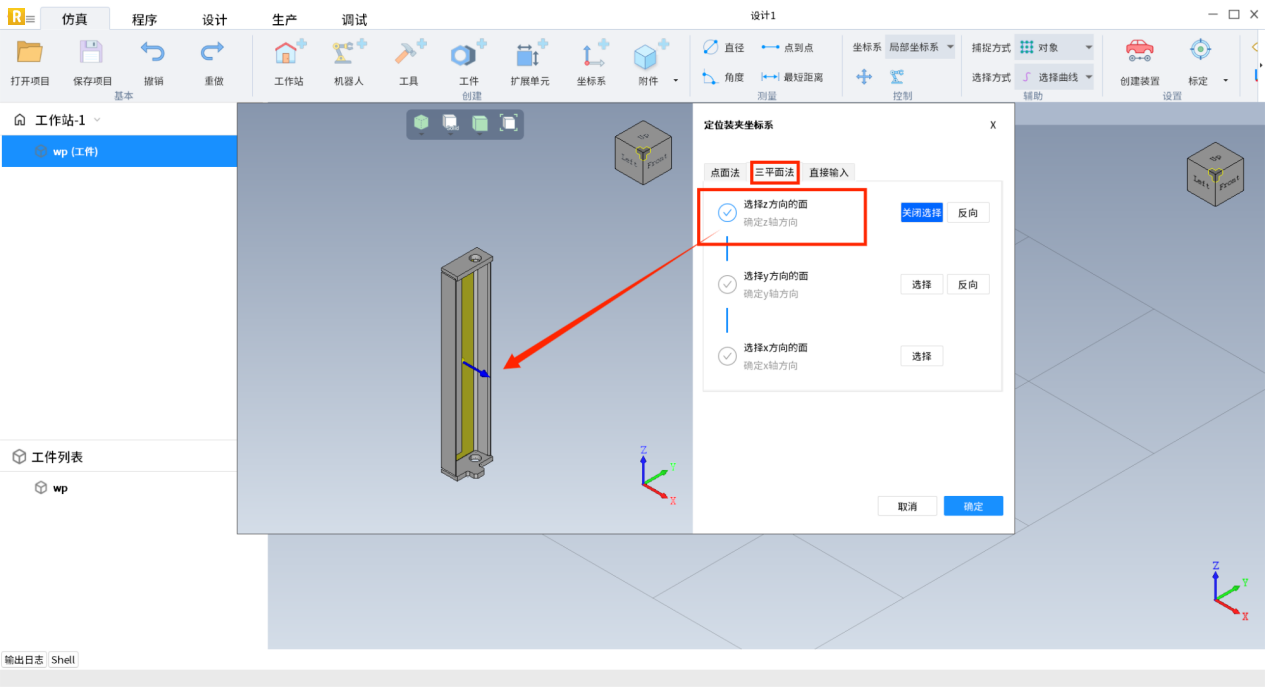
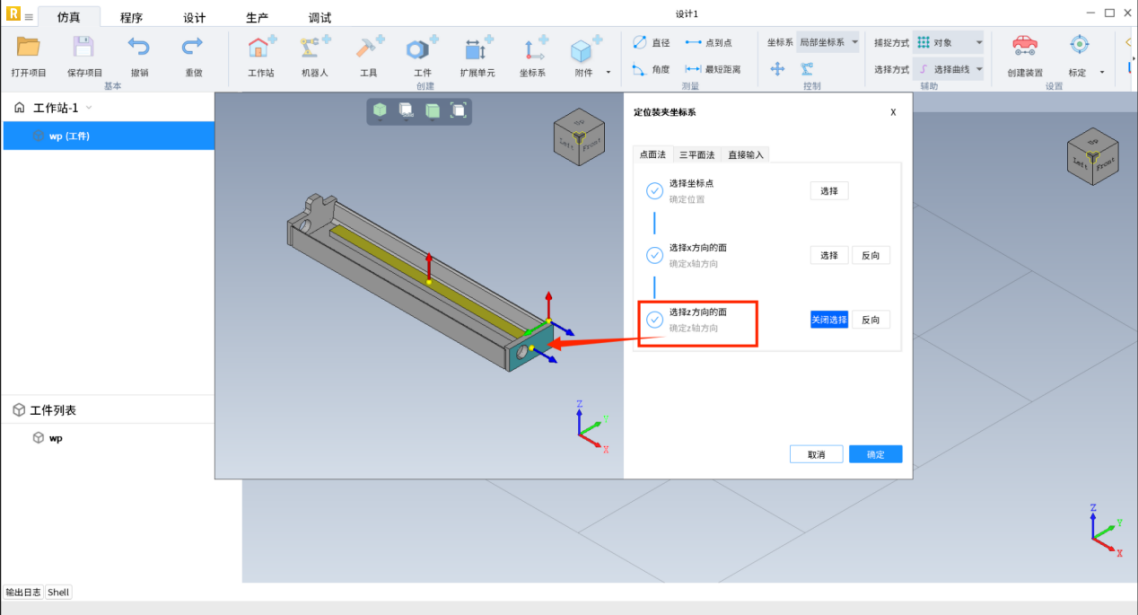
选择第二个面确定Y轴,绿色箭头为Y方向。 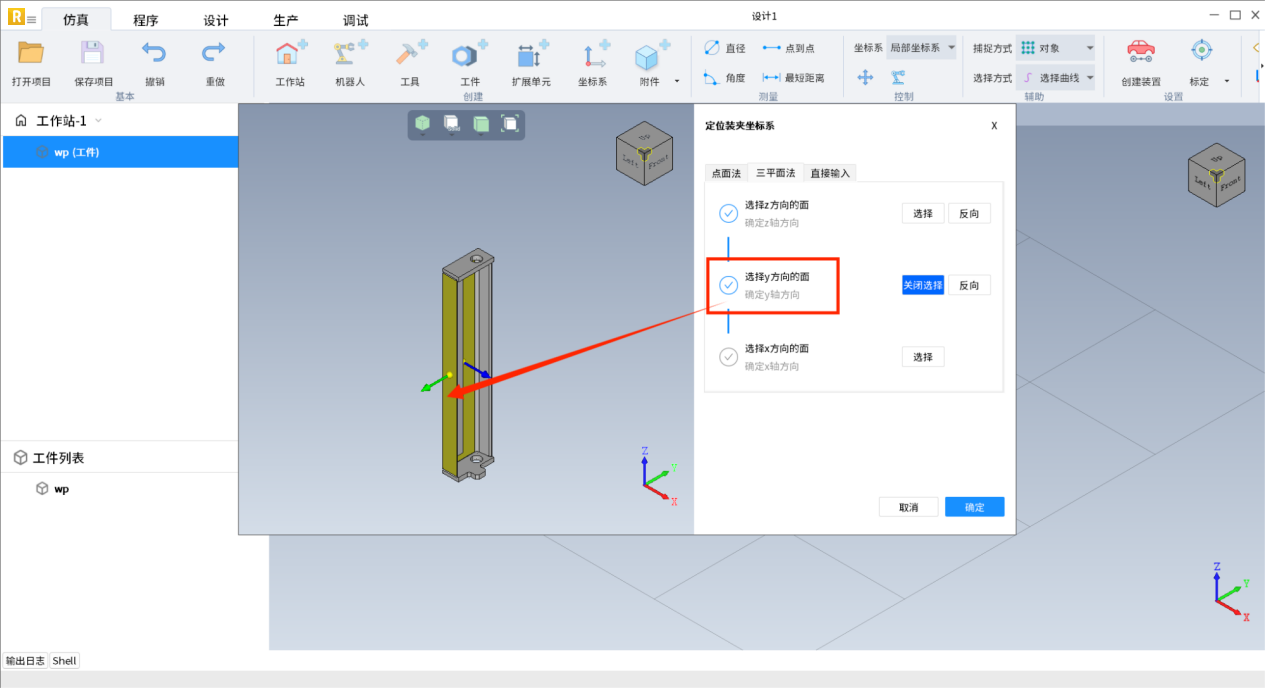 选择第三个面确定X轴,红色箭头为X方向。三面相交点为新建坐标系原点。
选择第三个面确定X轴,红色箭头为X方向。三面相交点为新建坐标系原点。 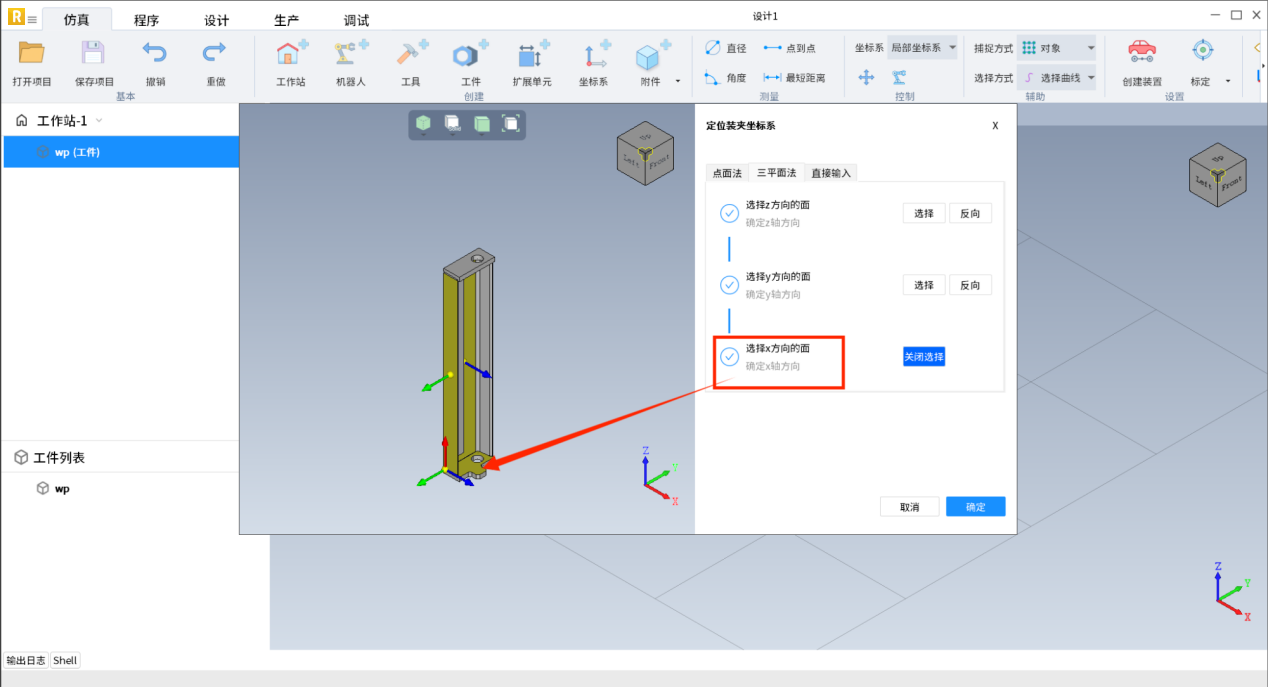 然后点击确认。即重定义了一个坐标系。
然后点击确认。即重定义了一个坐标系。 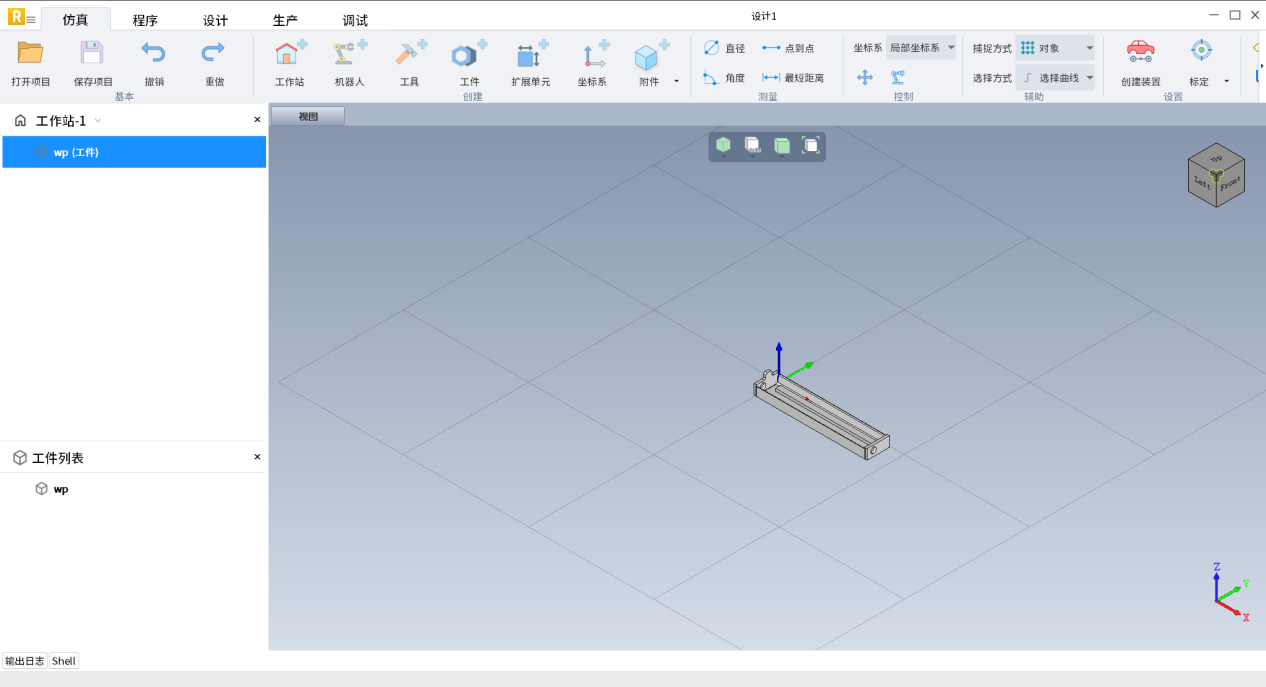
③直接输入
若用直接输入,则直接在右侧面板中输入对应坐标值即可。 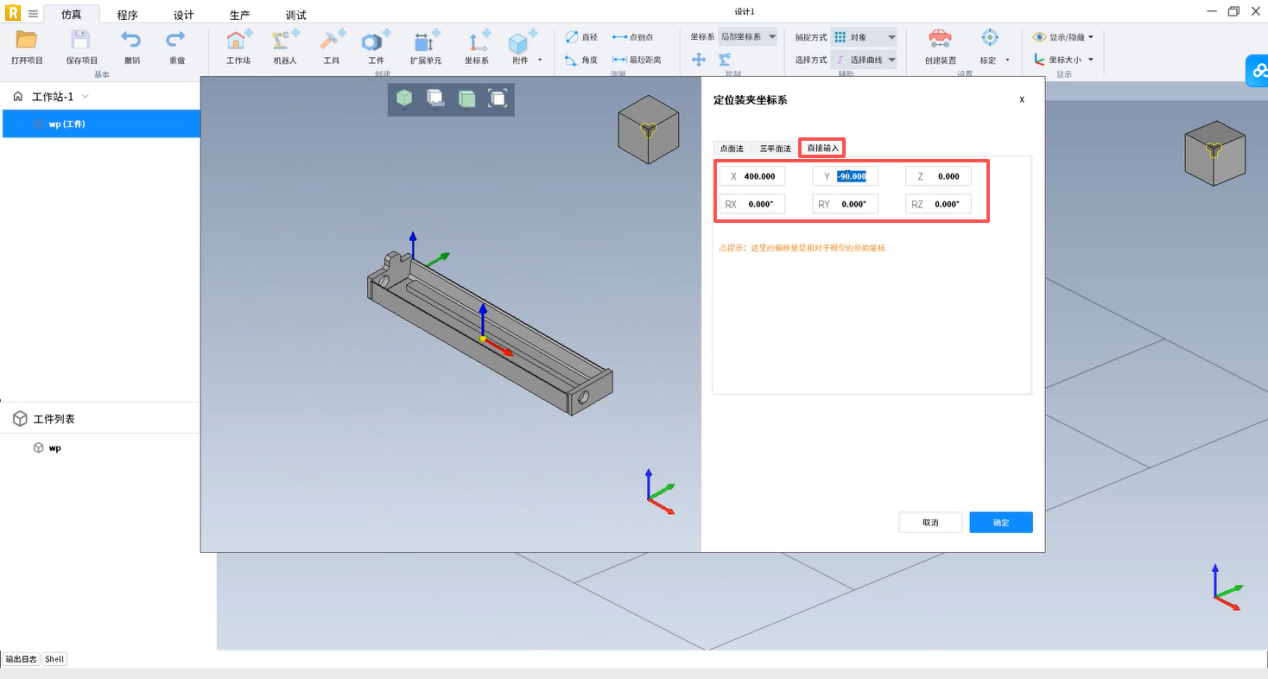
改变后: 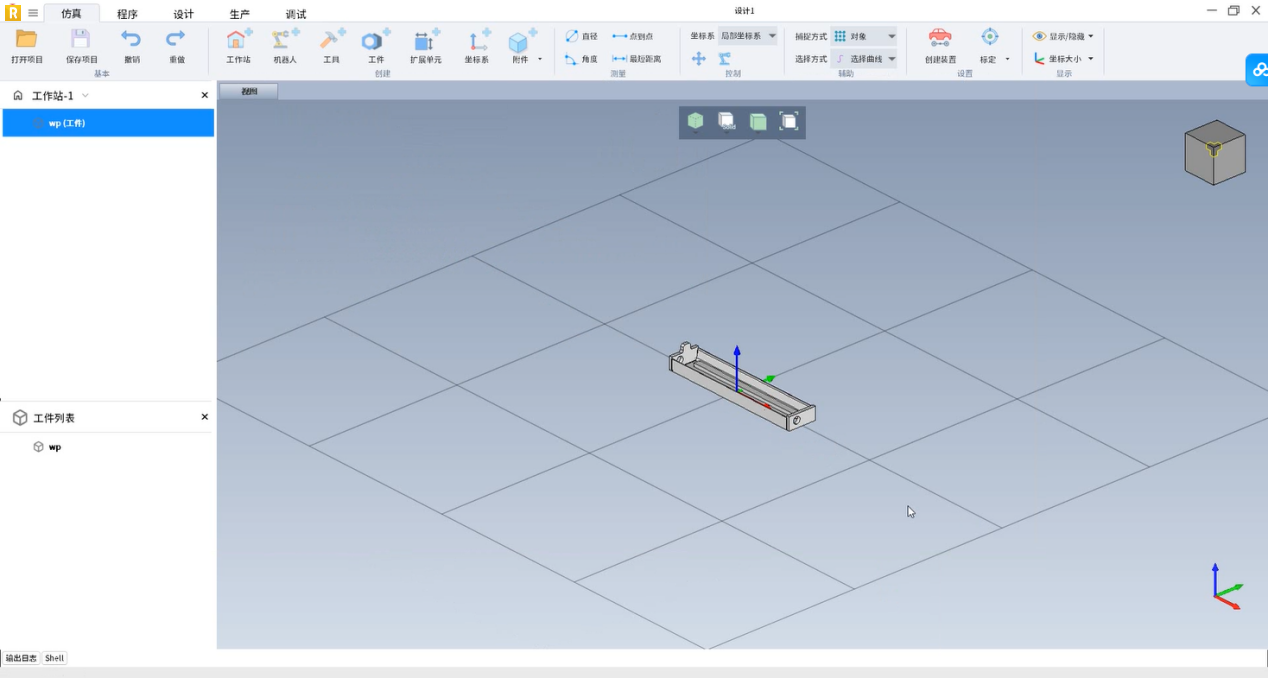
安装
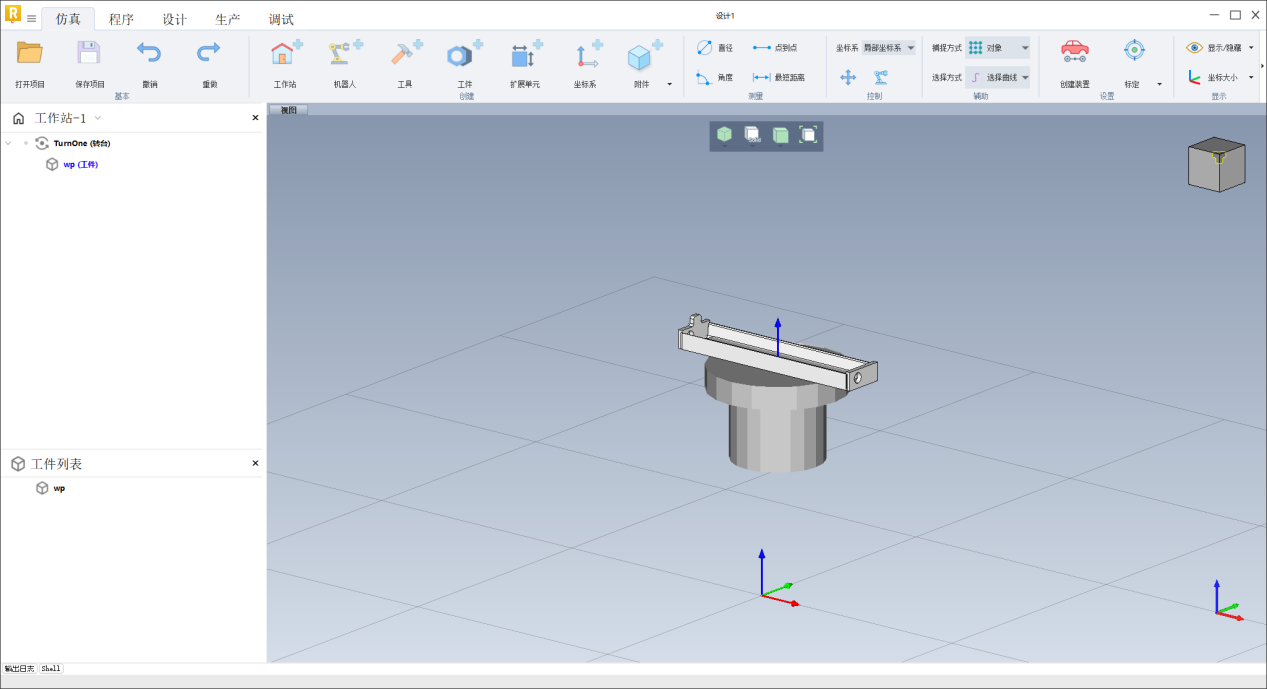
导入一个扩展单元。本案例中以导入转台TurnOne为例。导入后工件并未安装在转台上如下图所示。 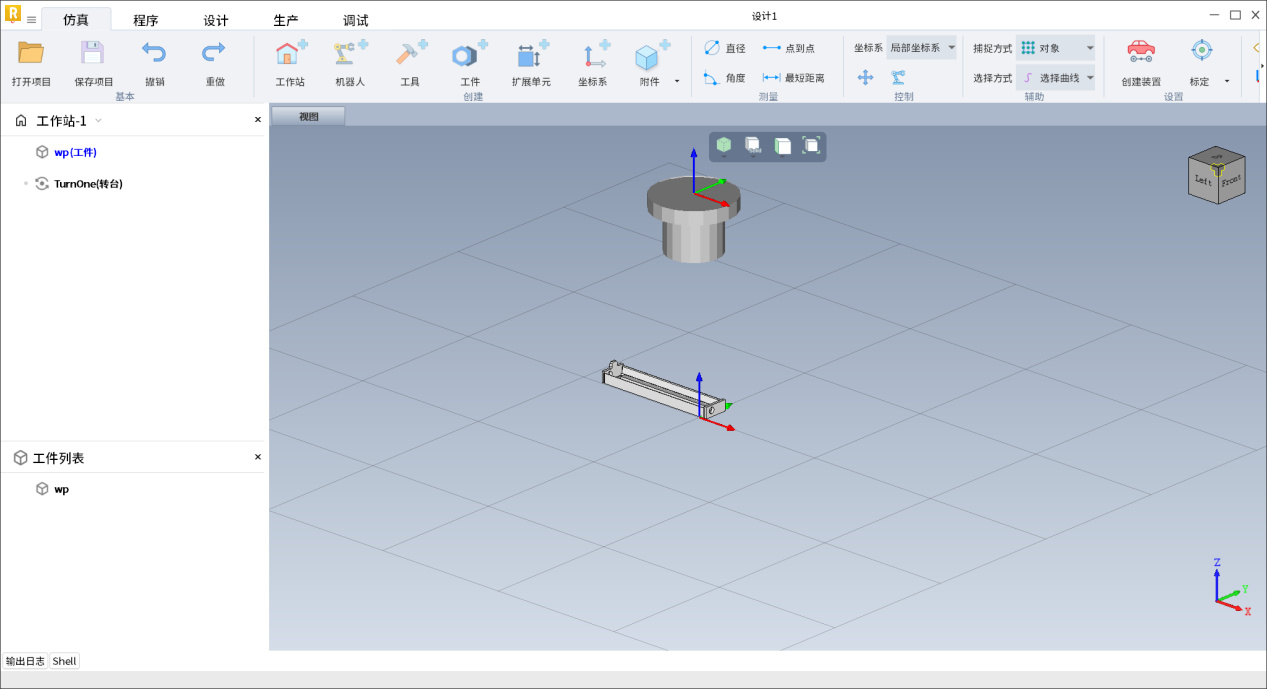
设备树中右键点击工件,鼠标悬浮在安装按钮上,会自动出现可安装的对象,选择TurnOne,即可将工件安装在转台上。 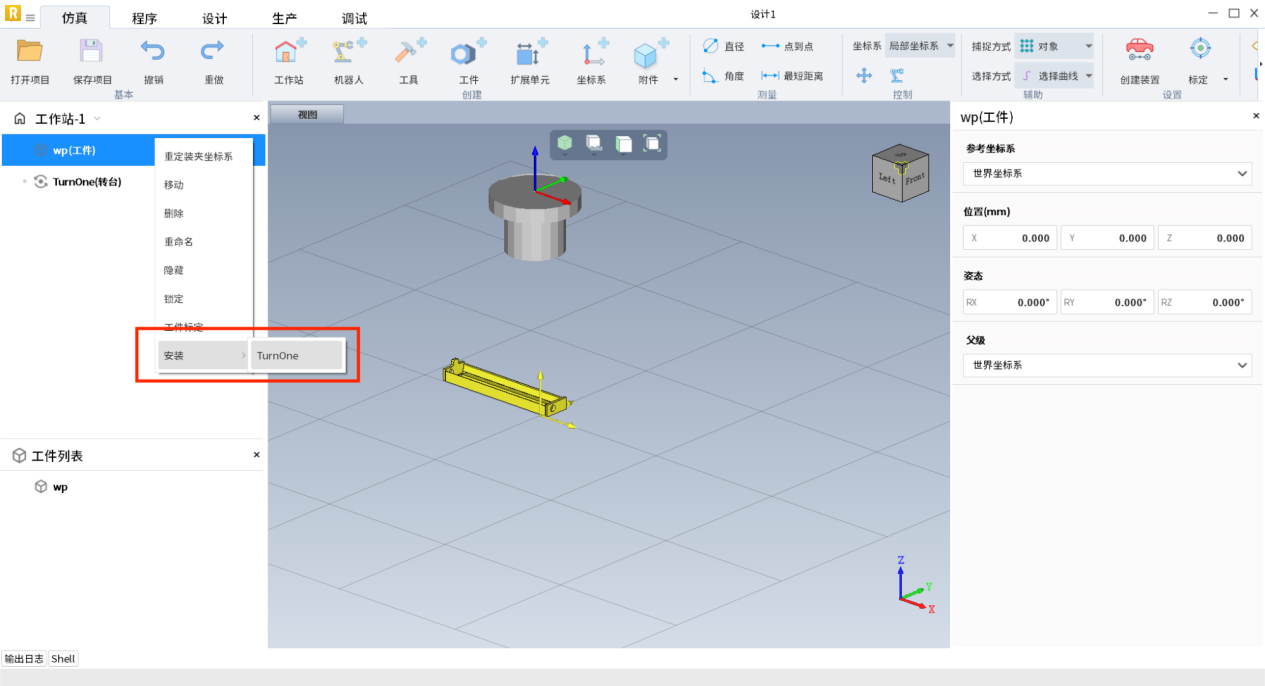
 点击“安装”按钮后,“安装”按钮会变为“卸载”按钮如下图所示。
点击“安装”按钮后,“安装”按钮会变为“卸载”按钮如下图所示。 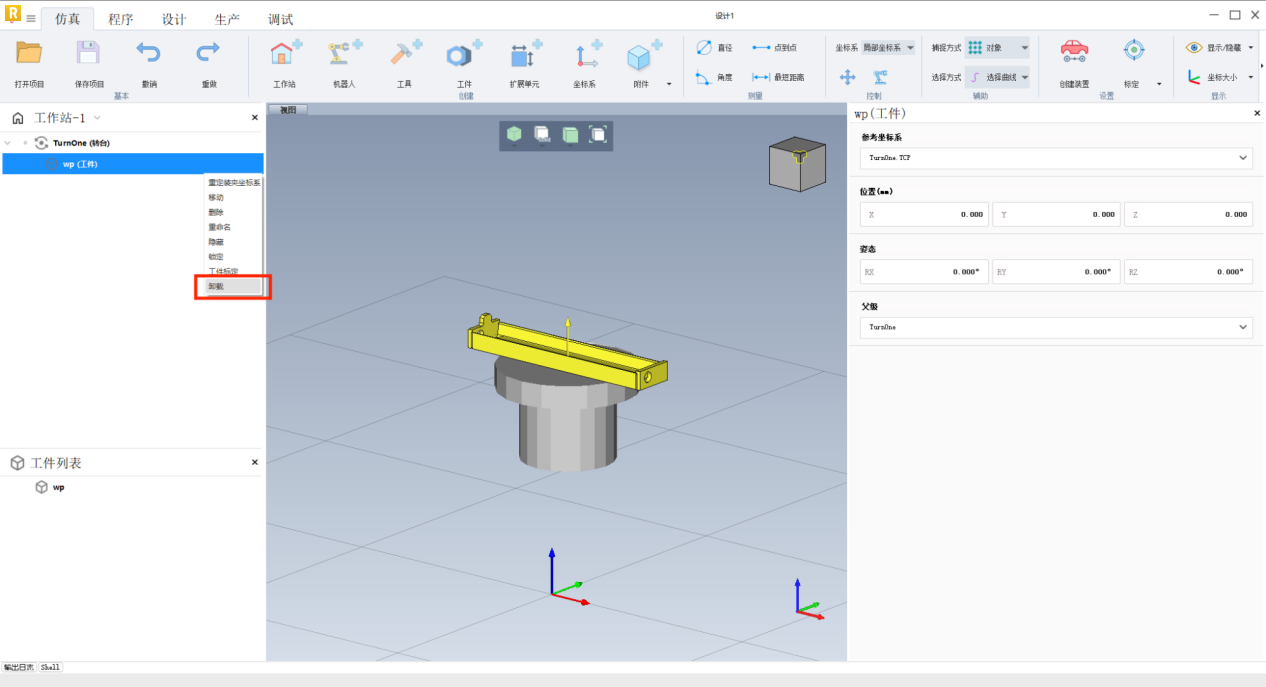 卸载之后如下所示,工件不再安装在转台上。
卸载之后如下所示,工件不再安装在转台上。 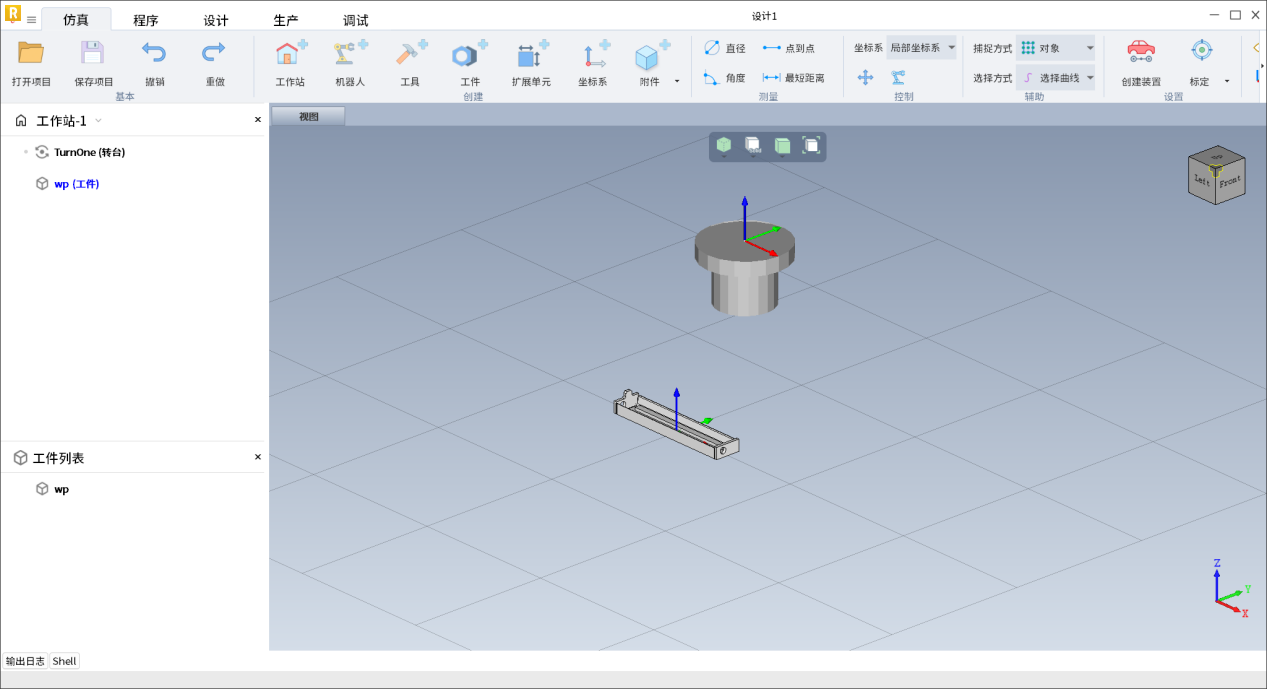 其他命令详情同2.1.1机器人-基础操作。
其他命令详情同2.1.1机器人-基础操作。
属性面板
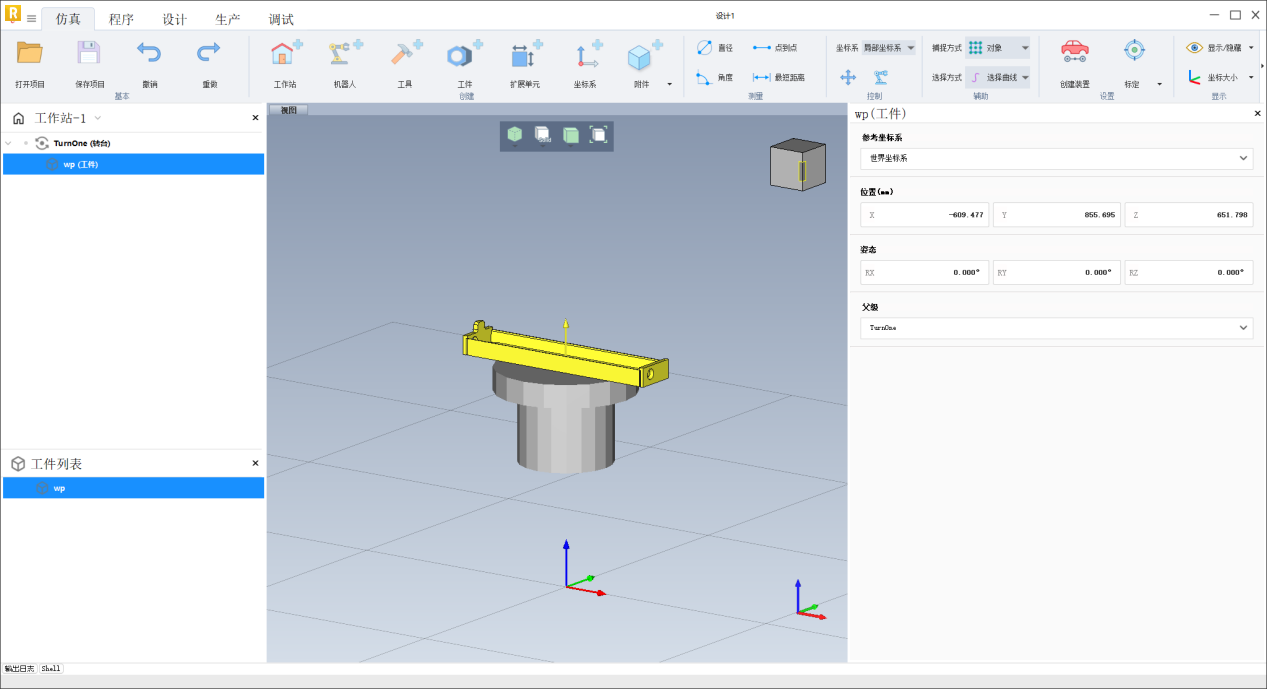
在左侧设备树中点击工件,右侧弹出工件属性面板。 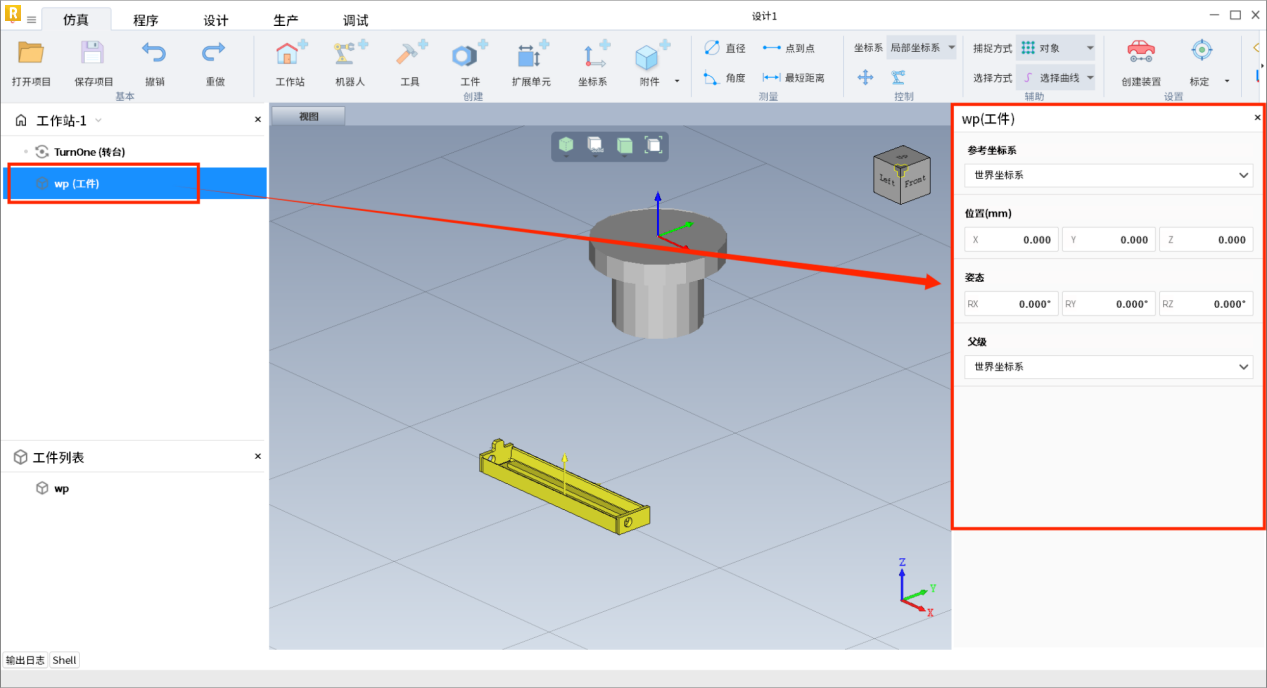 切换参考坐标系可以显示工件相对于参考坐标系的位置和姿态,修改数值可更改其位姿。
切换参考坐标系可以显示工件相对于参考坐标系的位置和姿态,修改数值可更改其位姿。 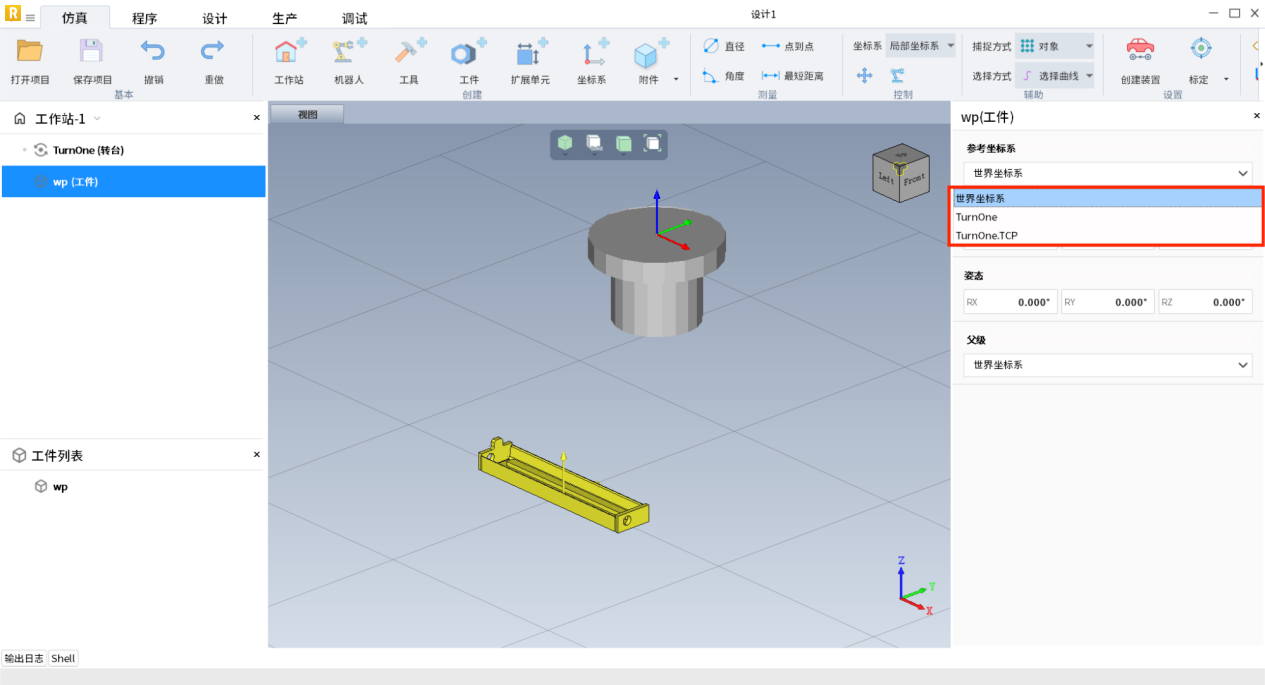 鼠标滚轮滑动数字或直接输入,可更改工件位置和姿态,如下图所示。
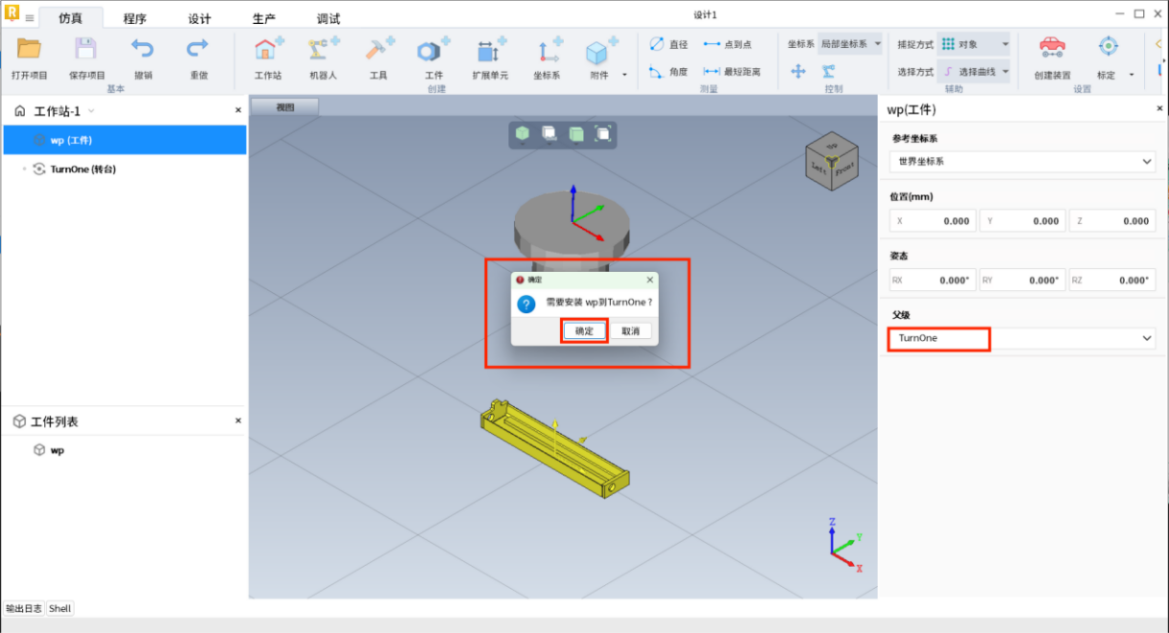
鼠标滚轮滑动数字或直接输入,可更改工件位置和姿态,如下图所示。 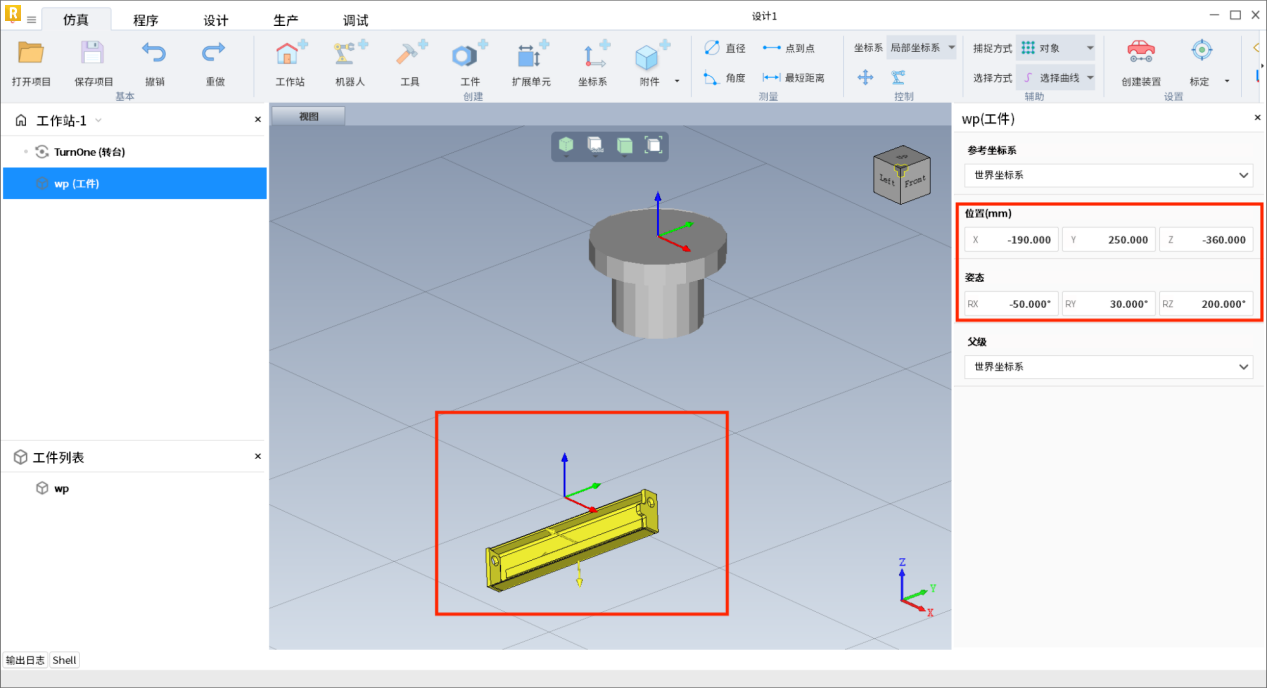 改变父级为转台,可将工件安装在转台上。
改变父级为转台,可将工件安装在转台上。 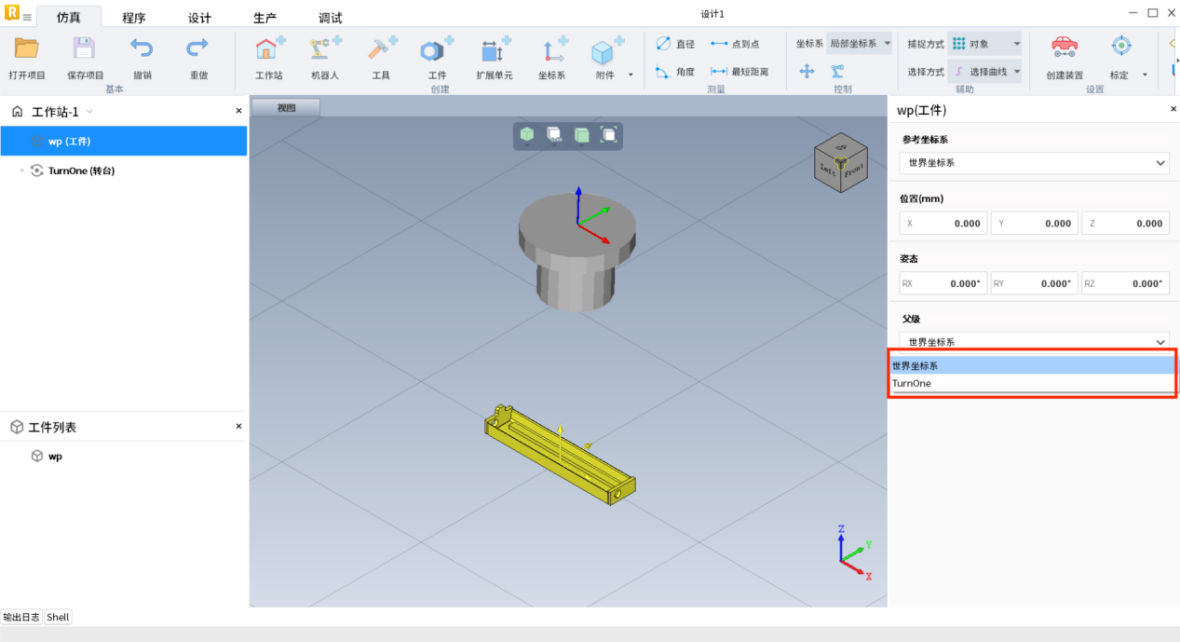
 安装成功:
安装成功: