外观
1.3快速入门示例
搭建一个包含机器人、工具、地轨和工件的简单工作站并进行计算仿真。
导入扩展单元
在菜单栏中点击“+扩展单元”按钮,弹出附加轴库面板,选择一个外部轴点击添加。 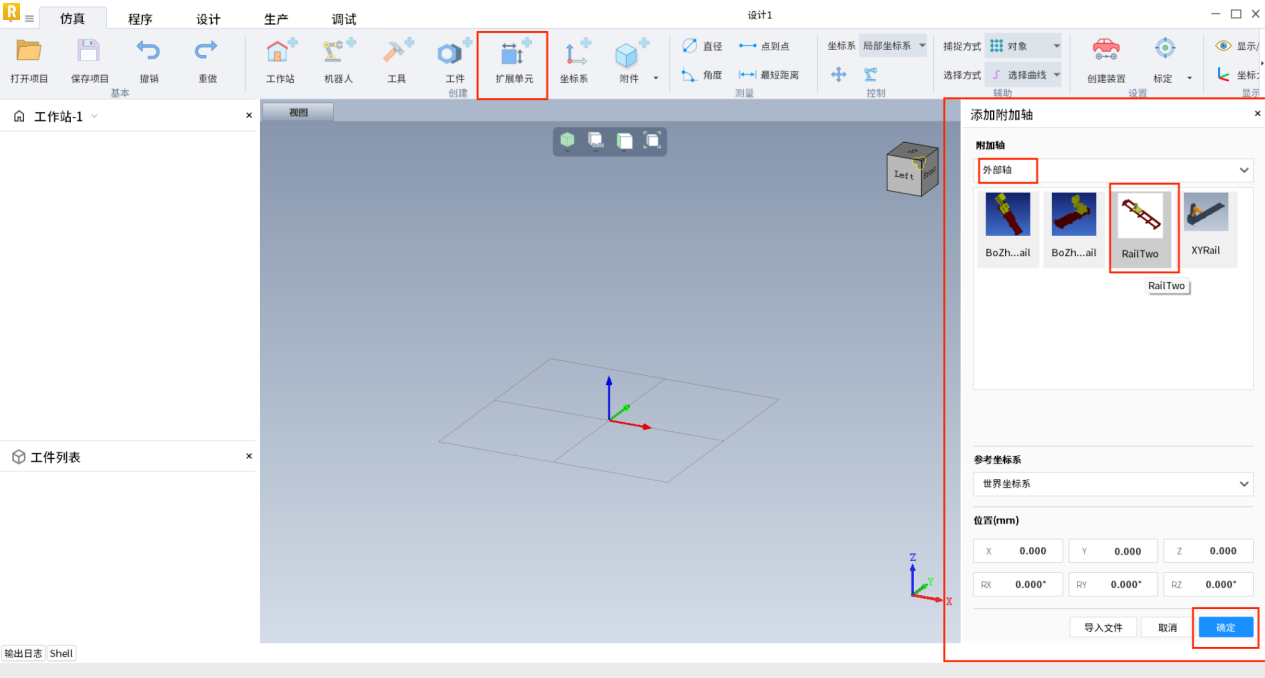
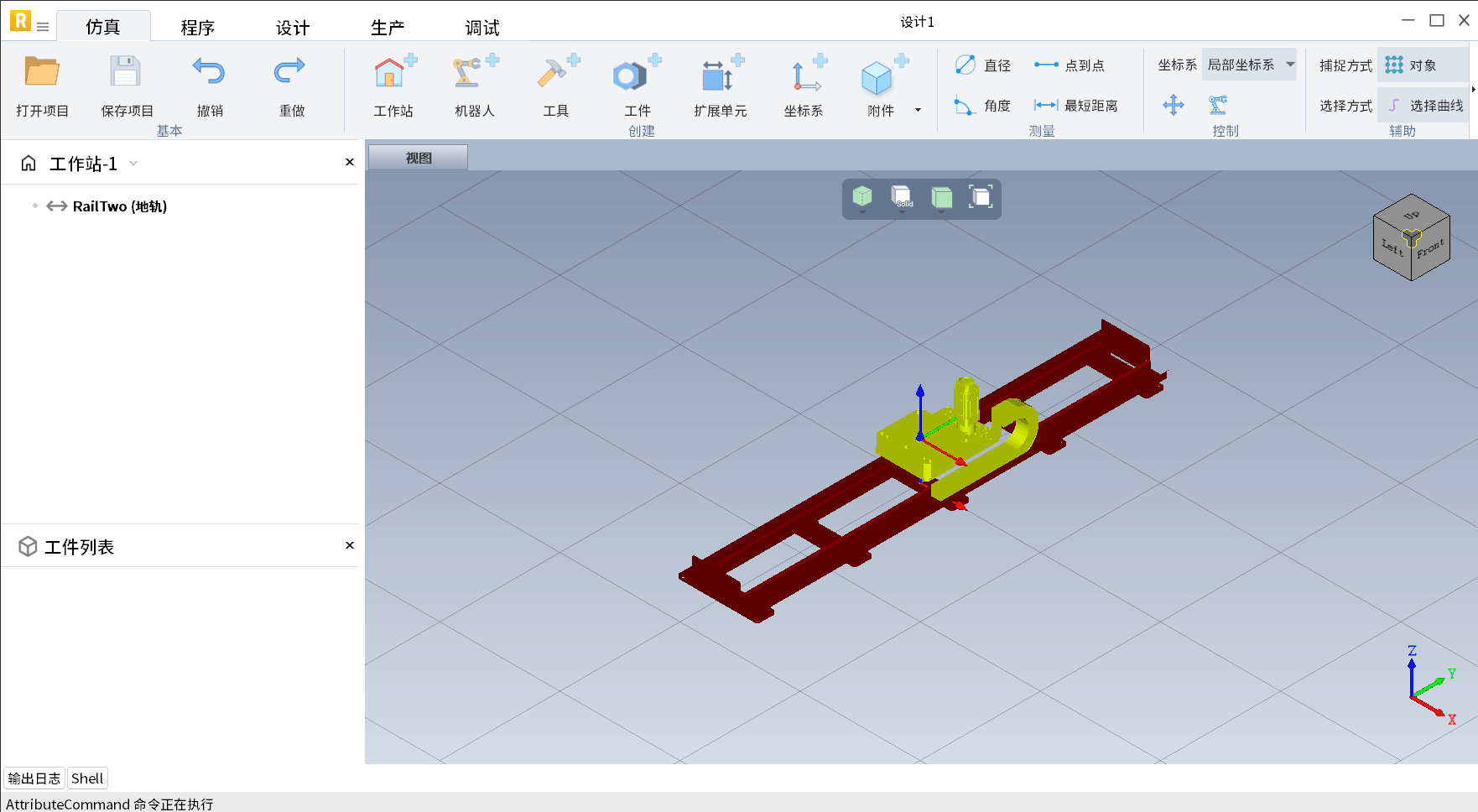
点击地轨弹出地轨面板,可在面板中设置步长(计算轨迹的时候,地轨的滑块间隔多少mm算一次,一般越大算的越快,越小算的精度越高),此处设置100。 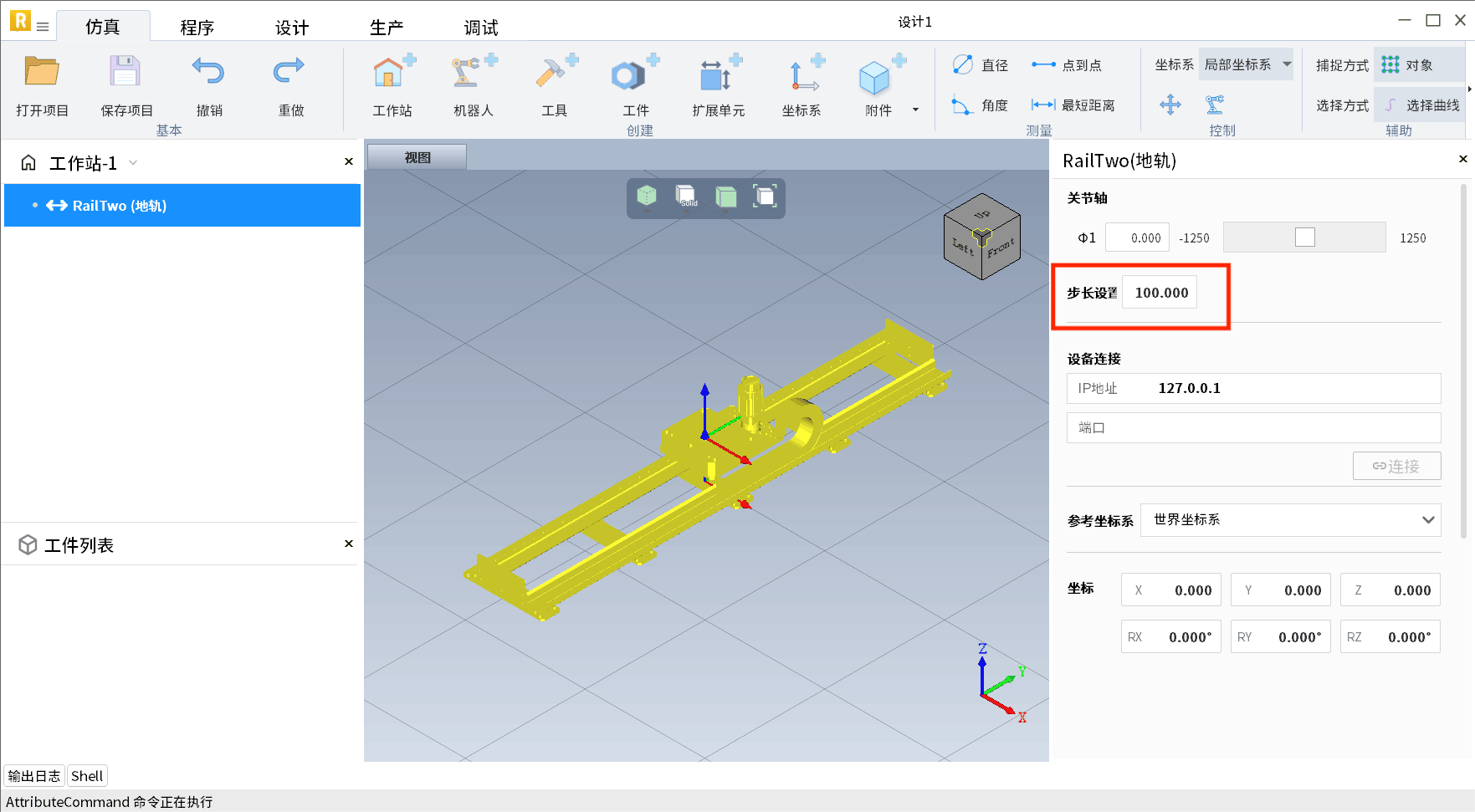
导入机器人
导入IRB1200_5机器人。 在左侧设备树中点击地轨,右键选择添加“+机器人”,机器人会自动安装在地轨上。 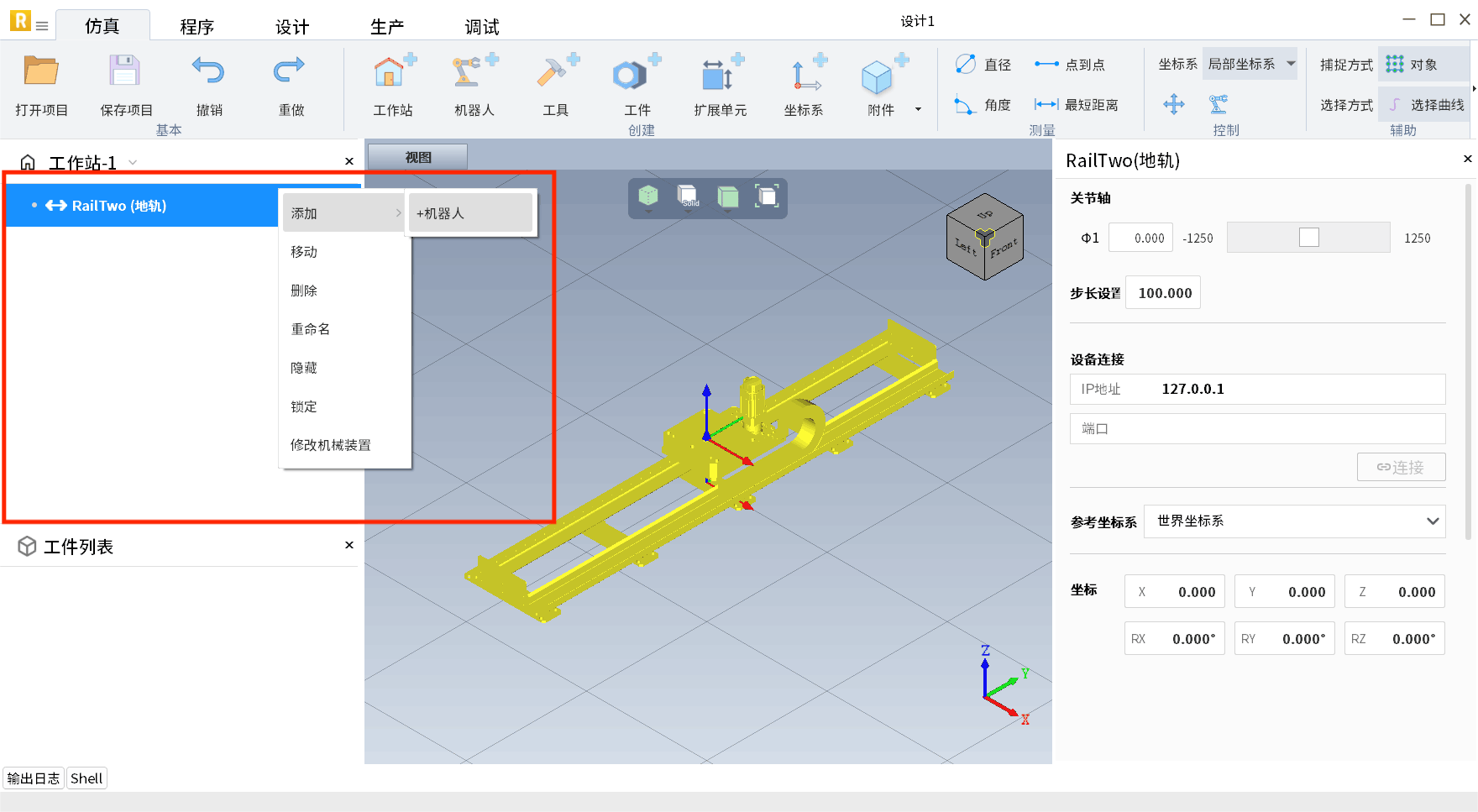 弹出机器人面板,选择IRB1200_5机器人,点击确定,即可导入。
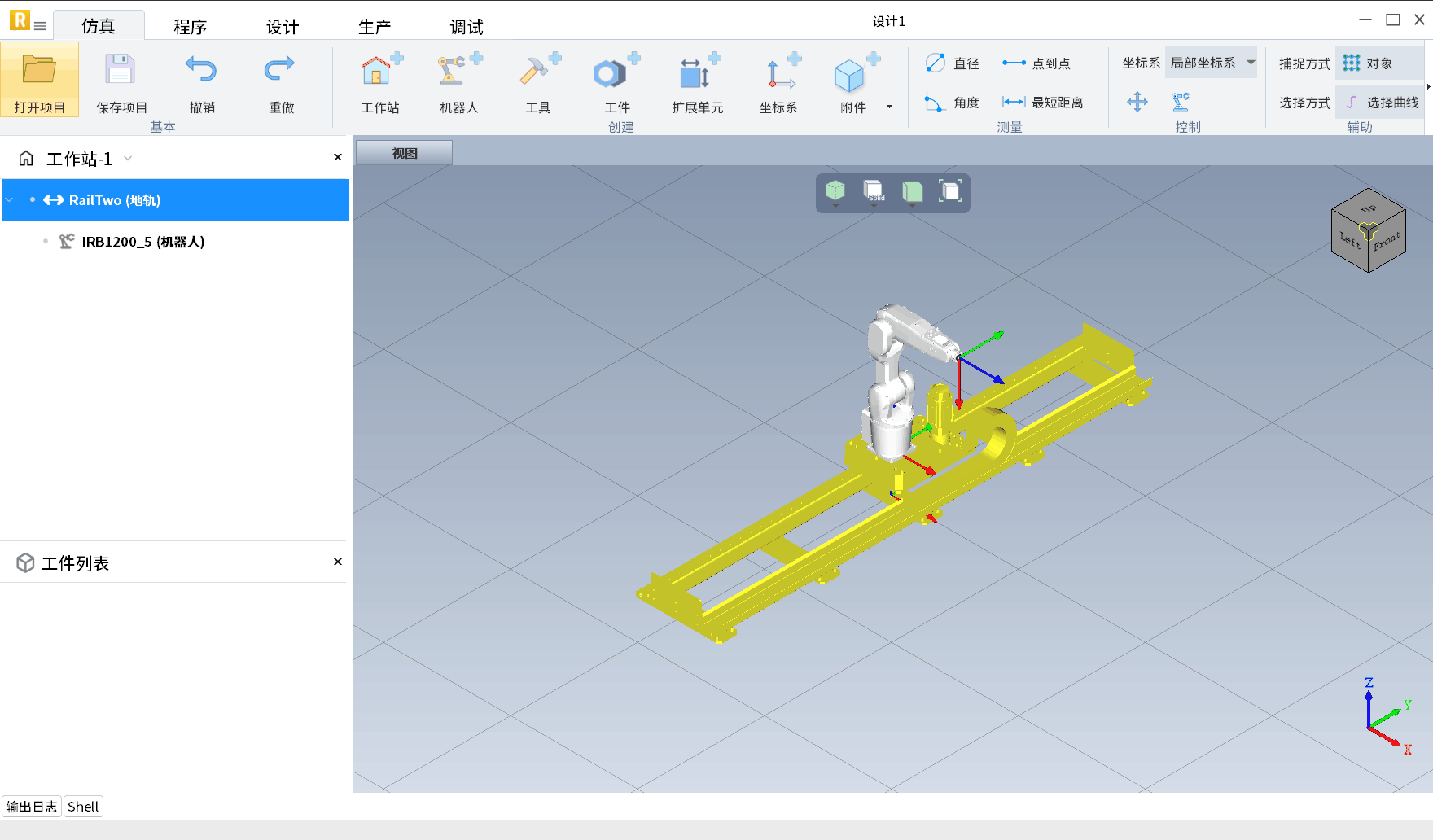
弹出机器人面板,选择IRB1200_5机器人,点击确定,即可导入。 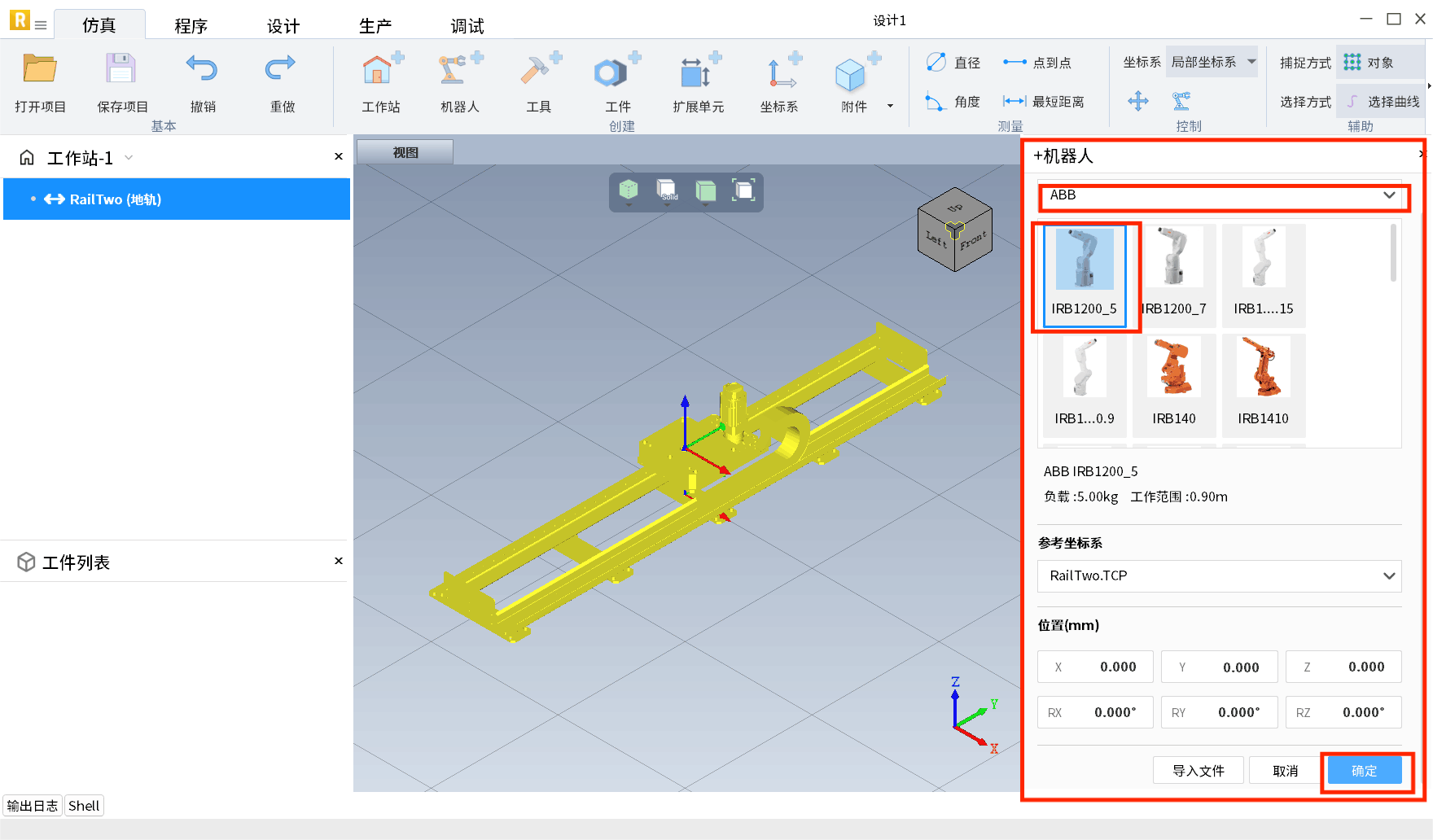
导入工具-焊枪
在左侧设备树中点击机器人,右键选择添加“+工具”。 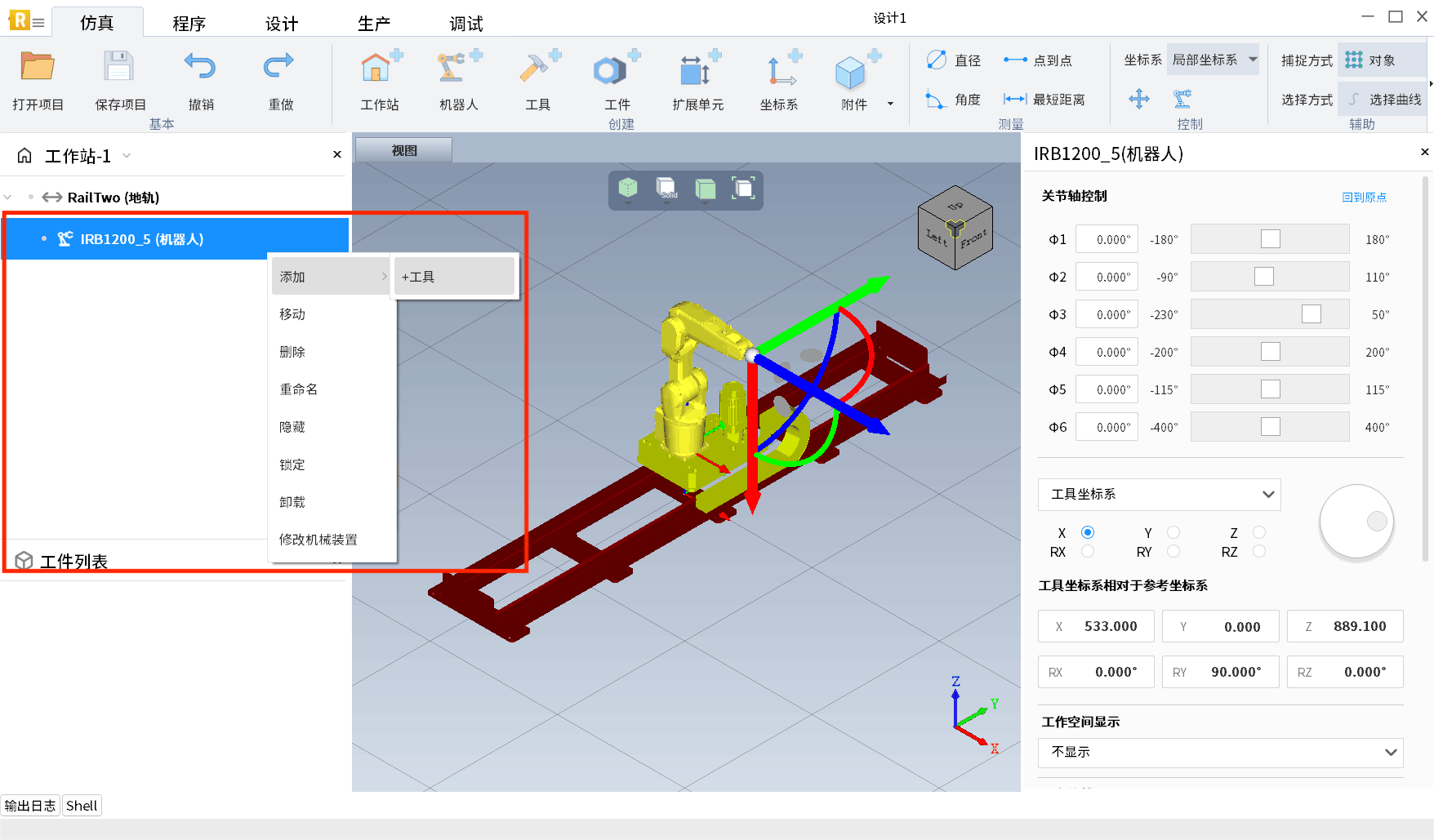
弹出工具面板,选择焊枪-HQ2,点击确定,即可导入。 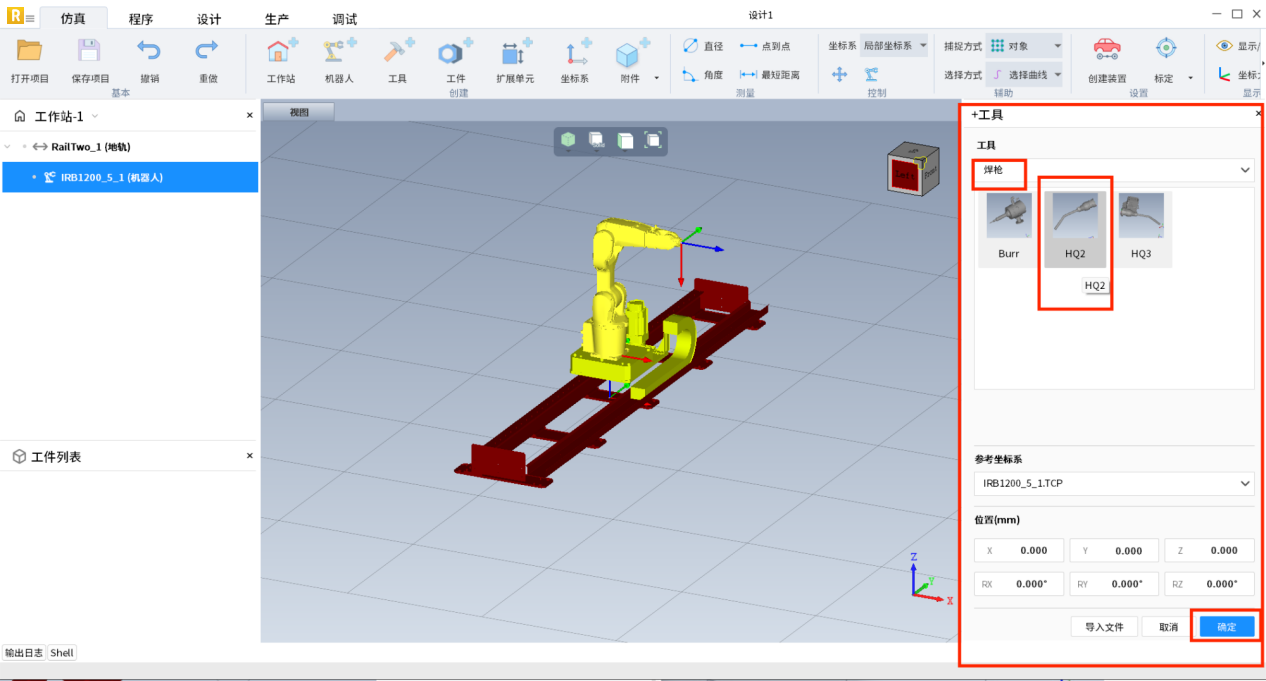
 Ps:焊枪TCP是用来定义焊枪工作位置和姿态的,焊枪TCP蓝色Z轴与焊枪头平行
Ps:焊枪TCP是用来定义焊枪工作位置和姿态的,焊枪TCP蓝色Z轴与焊枪头平行
导入工具-相机
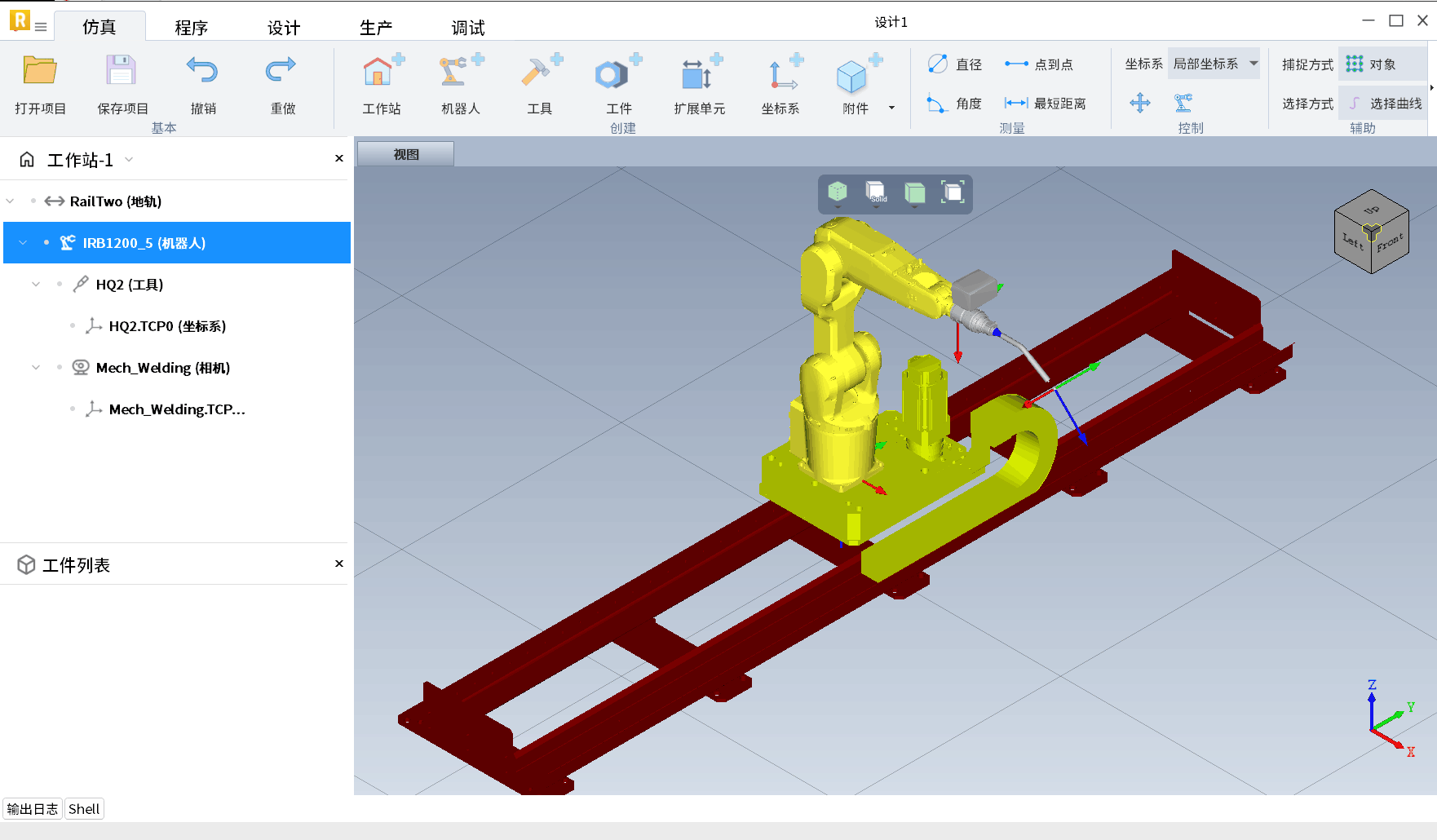
在左侧设备树中点击机器人,右键选择添加“+工具”。 弹出工具面板,选择相机-Mech_Welding,点击确定,即可导入。 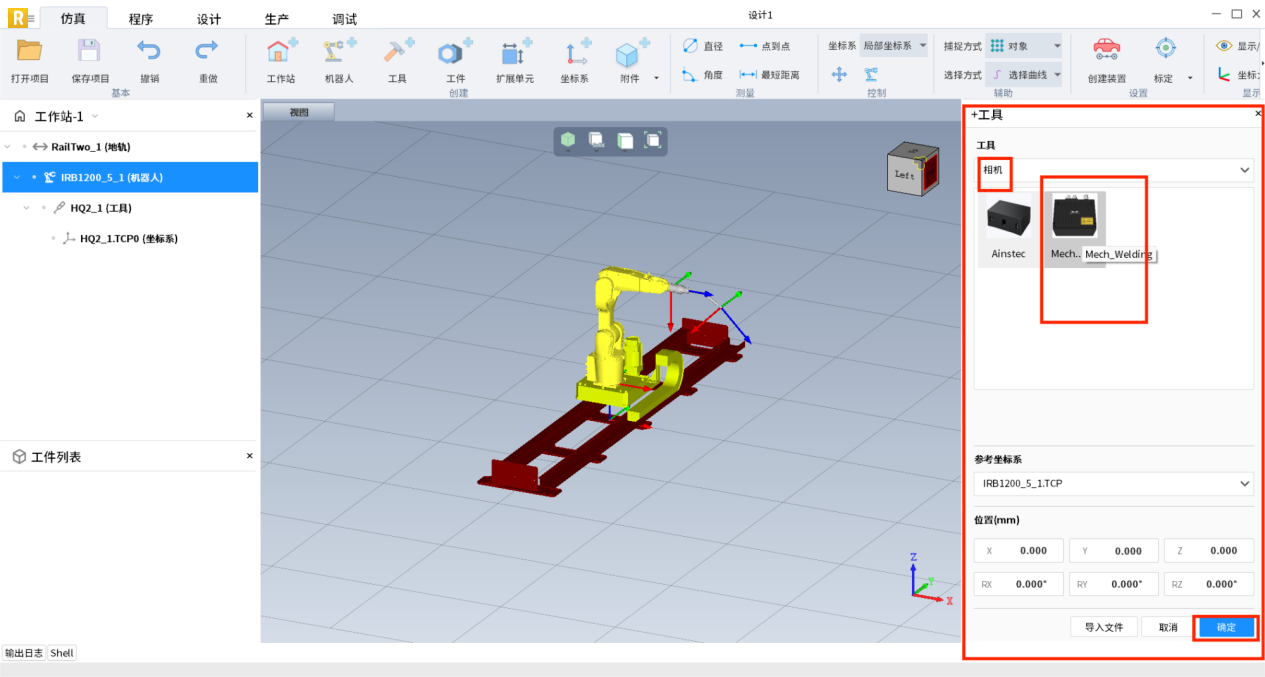
 Ps:相机TCP一般在相机模型摄像头位置,蓝色Z轴朝外
Ps:相机TCP一般在相机模型摄像头位置,蓝色Z轴朝外
在左侧设备树中点击相机坐标系,右键选择“移动” 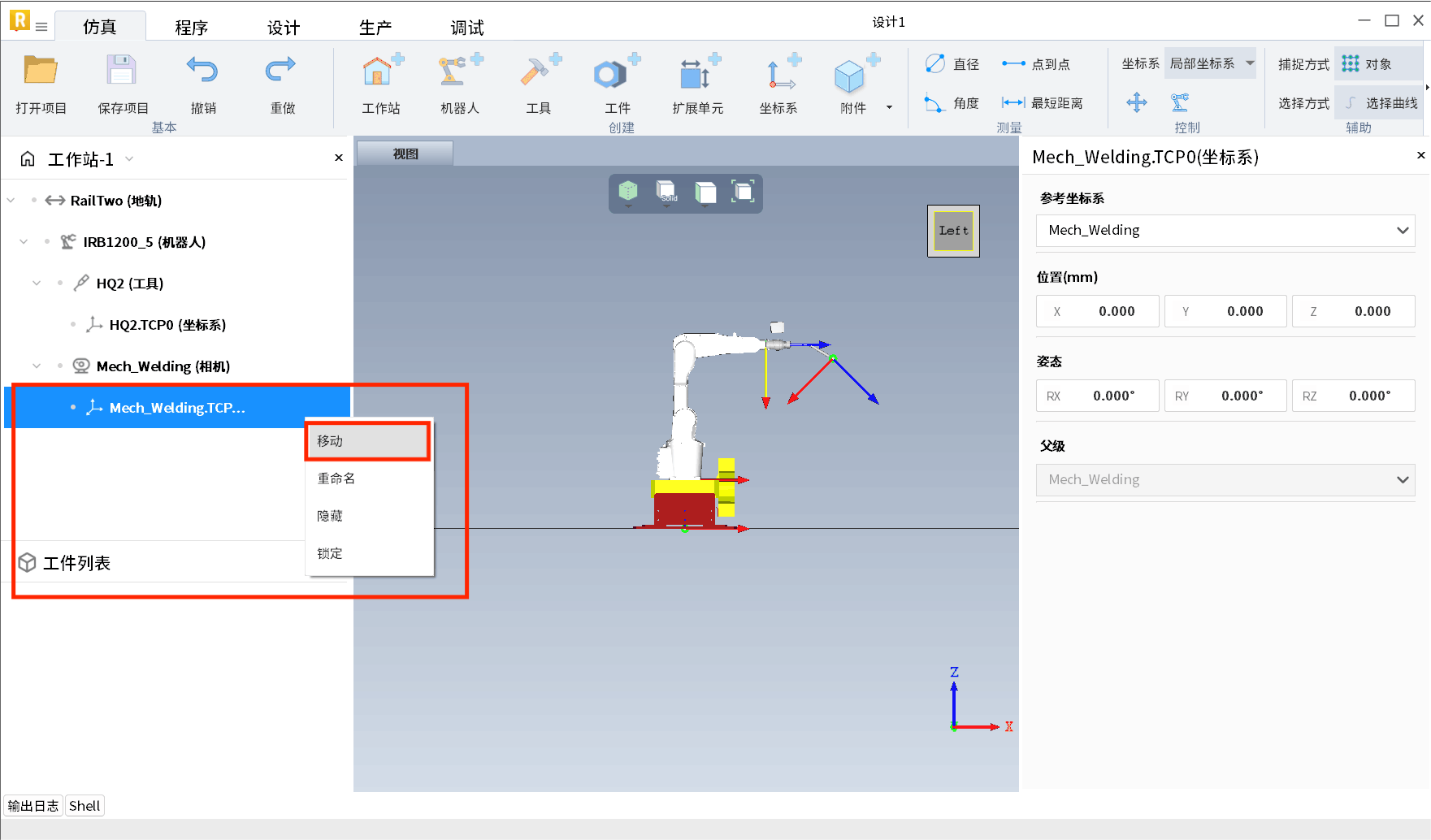 移动前:
移动前: 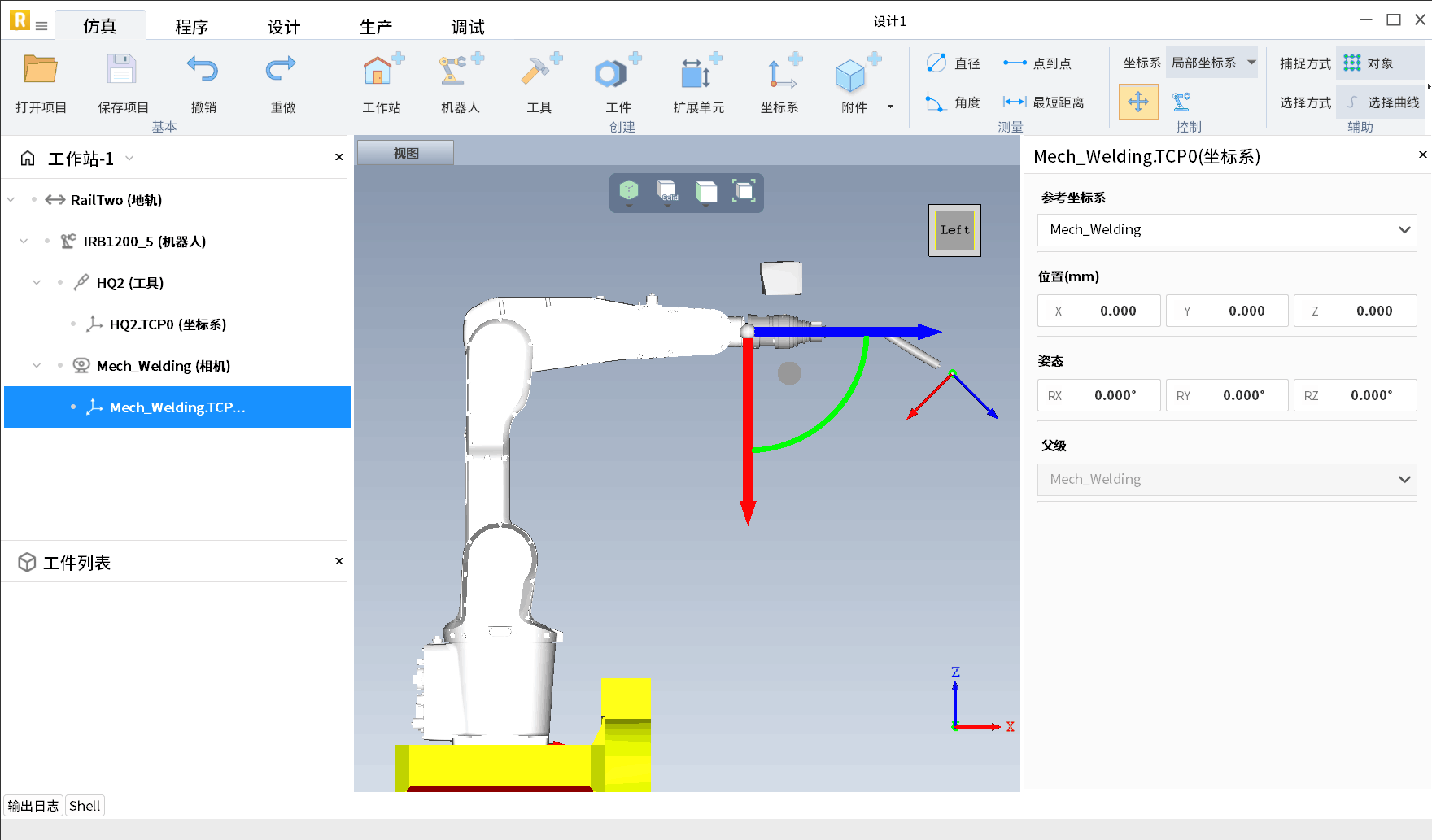
移动后: 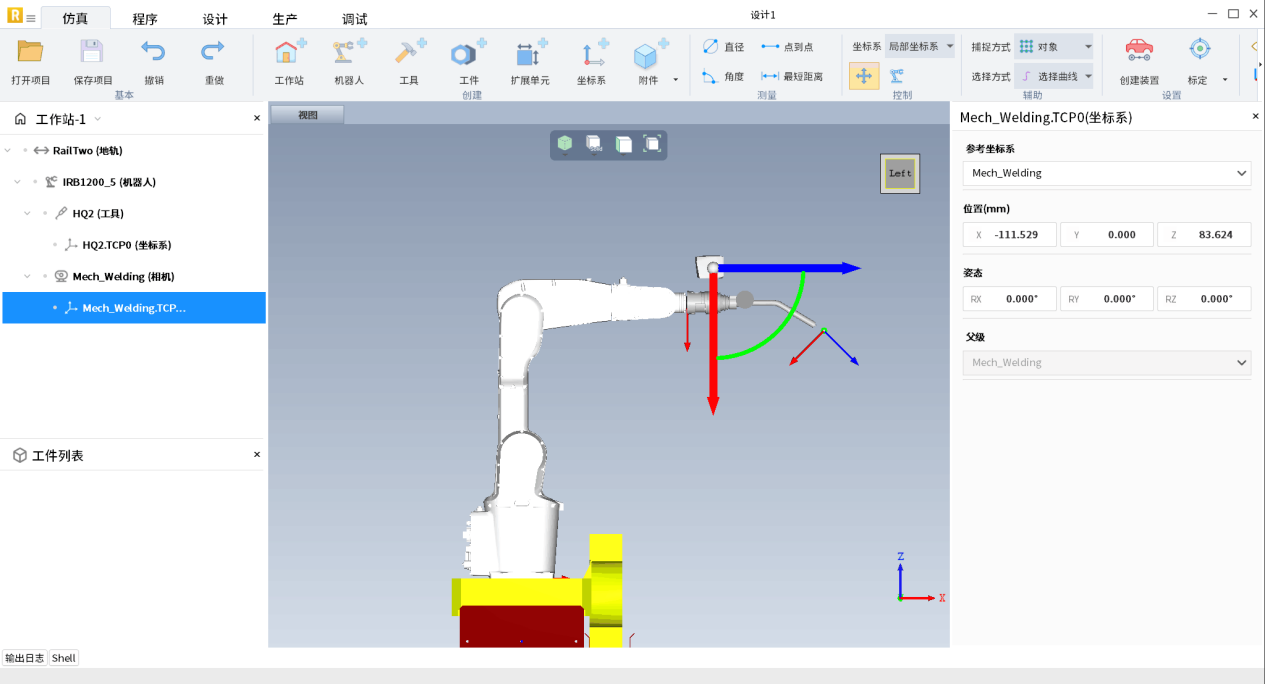
导入工件
在菜单栏中点击“+工件”按钮,弹出文件栏,选择需要的工件点击打开。 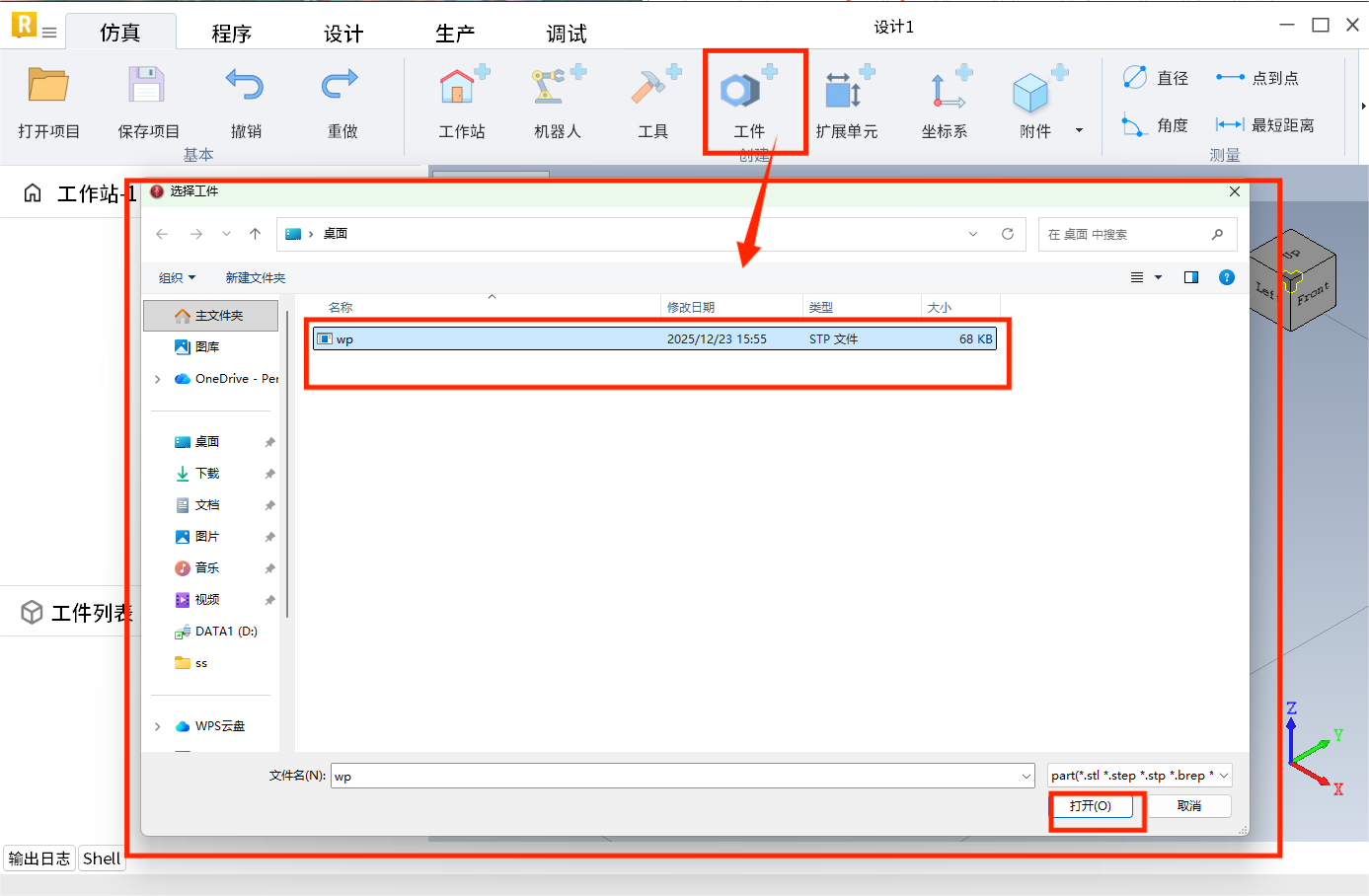
打开成功后,弹出导入工件面板。 当导入的工件坐标系不不方便用户操作时,用户可通过点面法、三平面法、直接输入等方式重新定义坐标系。 面板中可改变工件参考坐标系; 鼠标滑动数字或直接输入均可改变工件对于参考坐标系的位置。 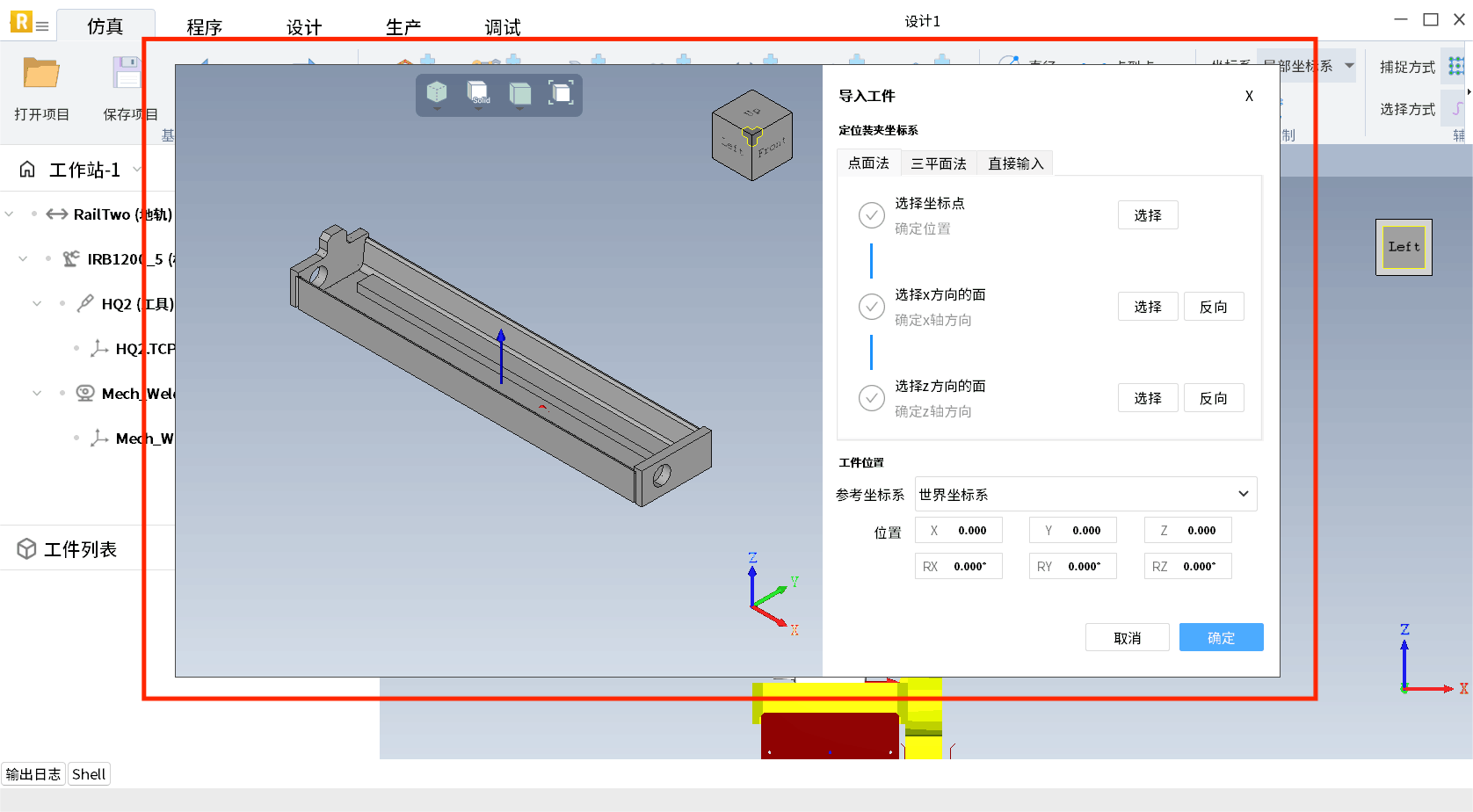
点击确认,导入工件成功,如下图所示。 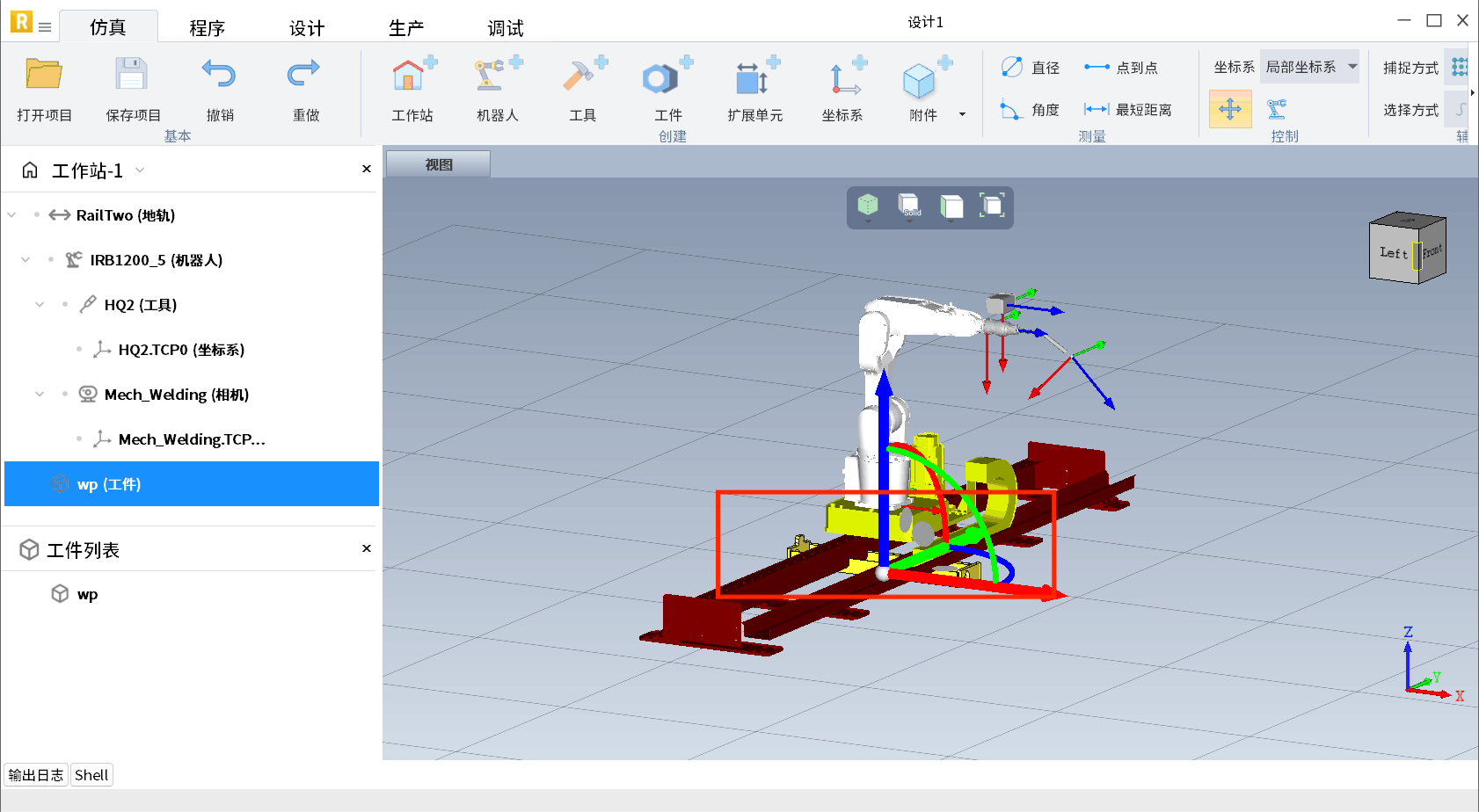
可在左侧设备树中点击工件,在图形视窗中鼠标拖曳坐标系,可以对工件进行位置移动和姿态调整,将工件挪动到合适位置,如下图所示: 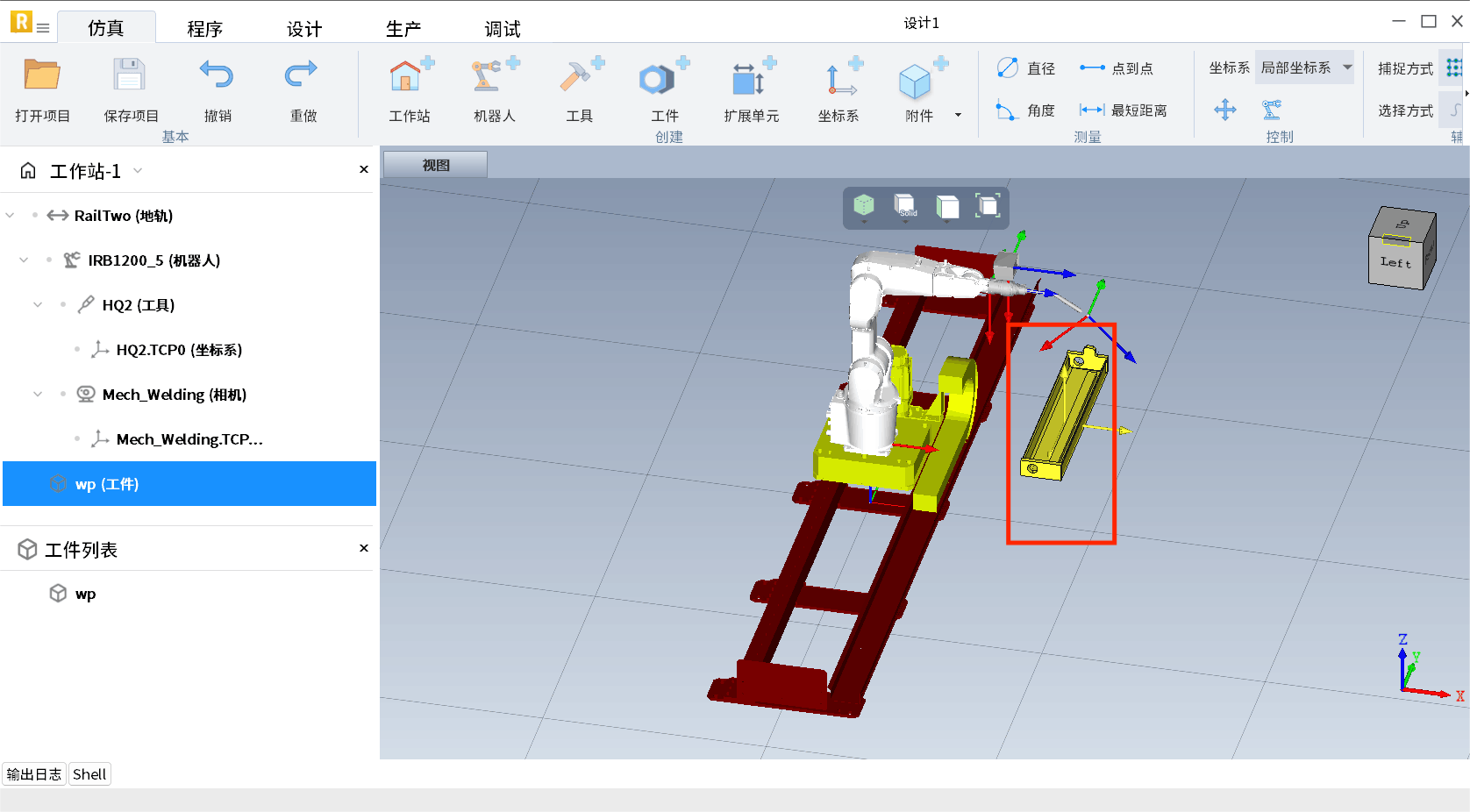
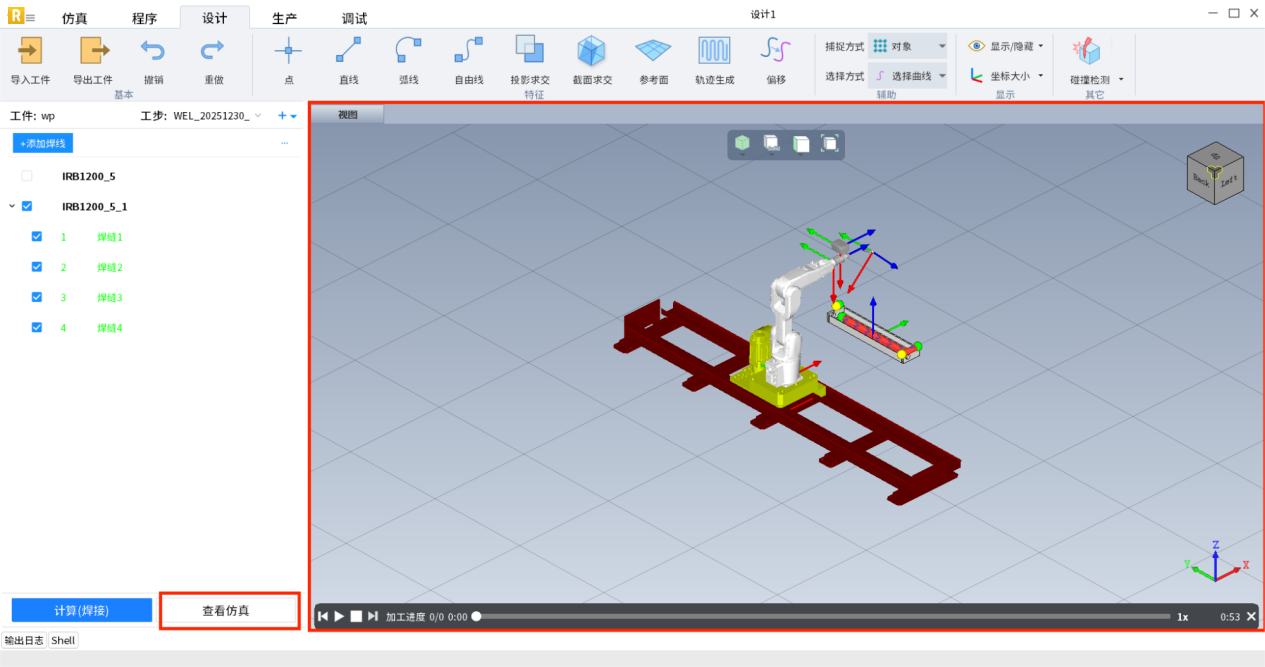
选择焊线
菜单栏点击“设计”,进入设计页面 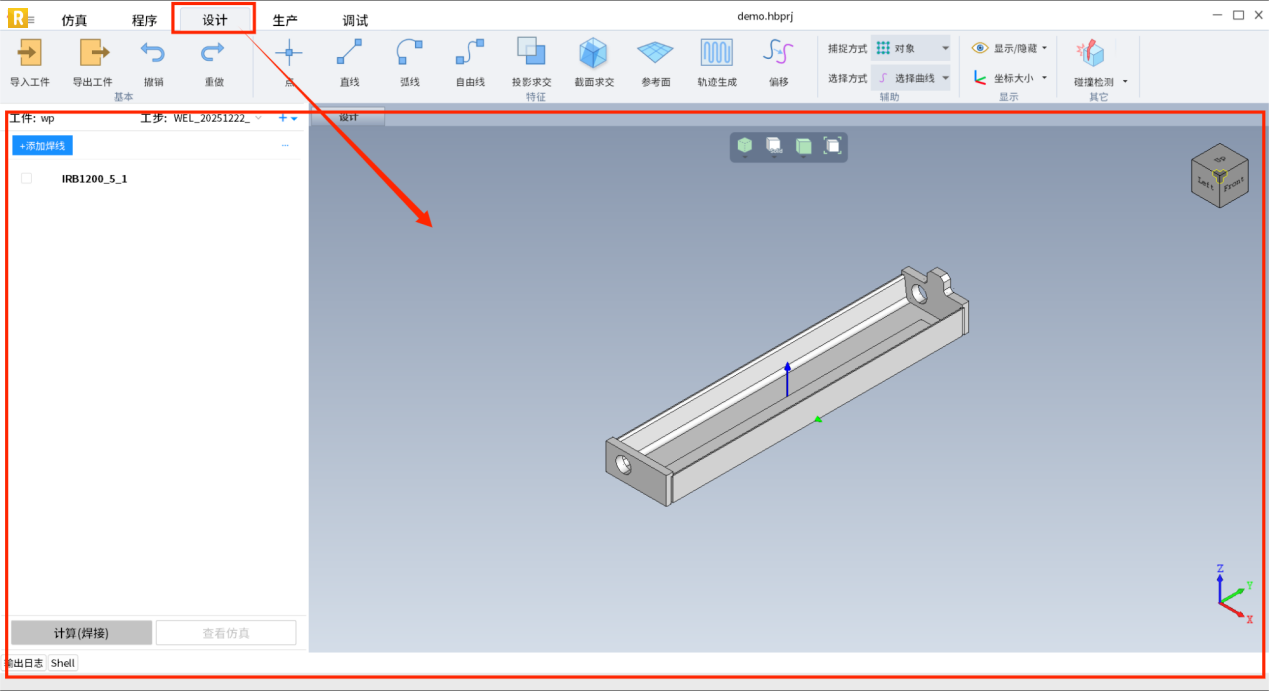
在左侧面板中,点击添加焊线右侧…图标,选择工作组配置。工作组即执行焊接任务时所用到的机械设备组合。 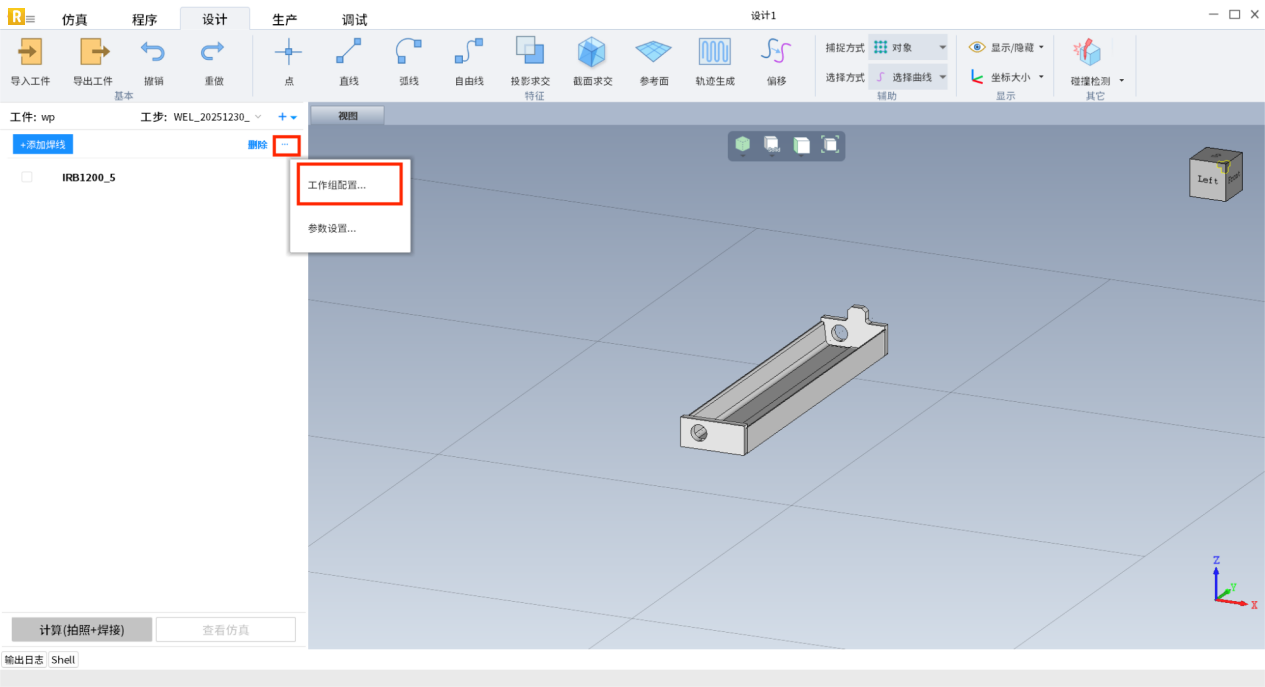
弹出工作站配置面板。直接点击“+”添加我们想要的工作组。 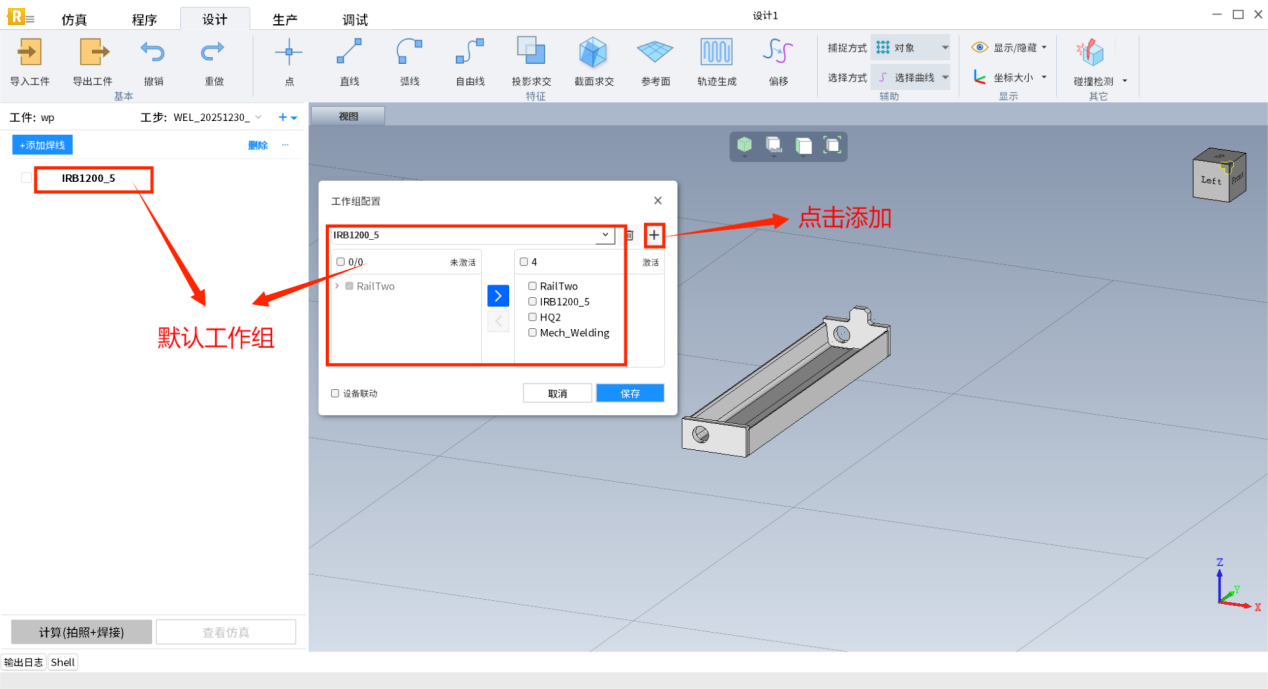
点击添加后,出现如下画面,左边栏显示可选设备列表,右边栏是已选择的设备。 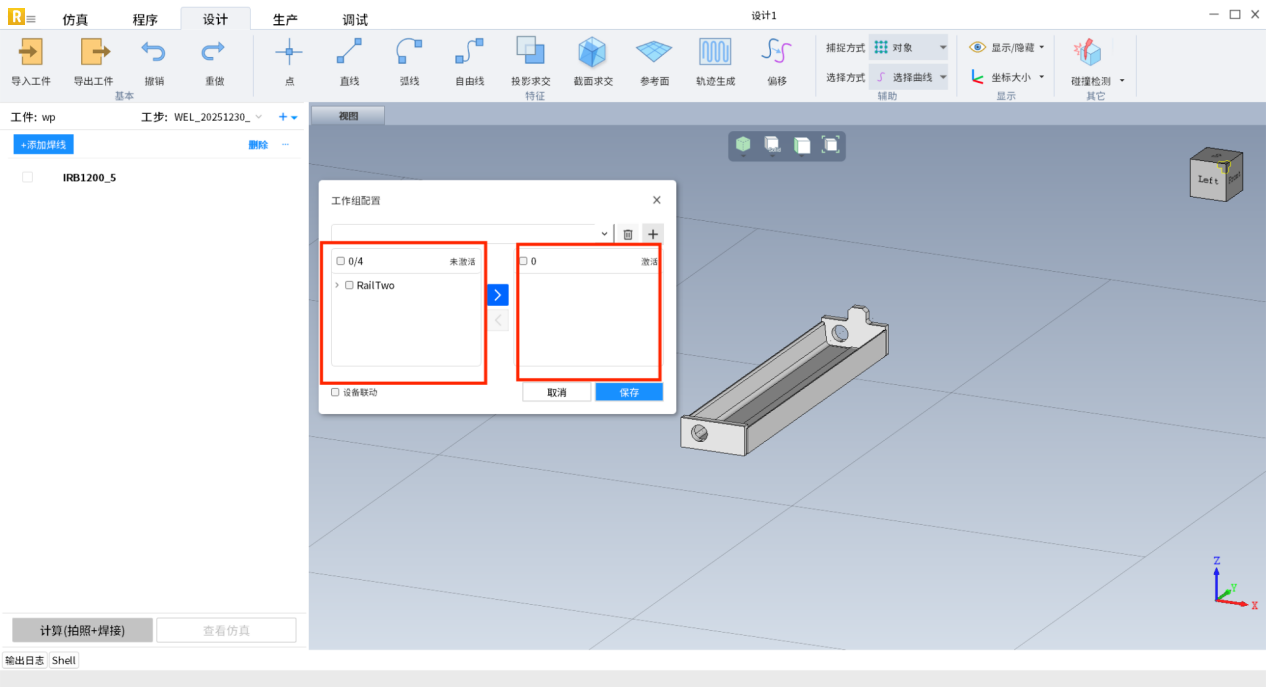
选择一个父节点,则相当于已经选择了其全部子集。 如下图所示,选择顶层的地轨RailTwo,会自动选择其子节点的所有设备。 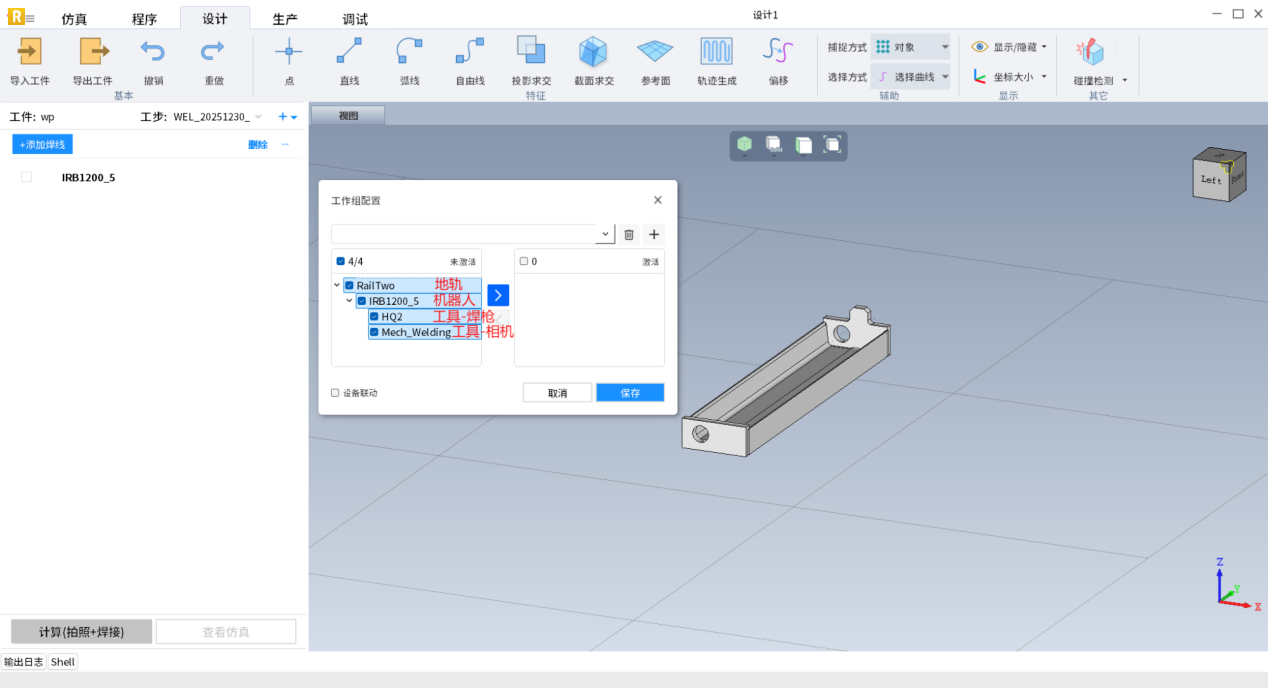
若选择地轨,机器人工作的时候会在地轨上动,没选地轨,机器人不会在地轨上移动。 勾选设备联动时:机器人可以在地轨上移动的同时执行焊接任务。 不勾选设备联动时:机器人移动到一个位置之后停下来,再执行焊接任务。 本案例中,我们选择带地轨的工作组,勾选设备联动,点击“>”键,激活地轨及其子集,点击保存。 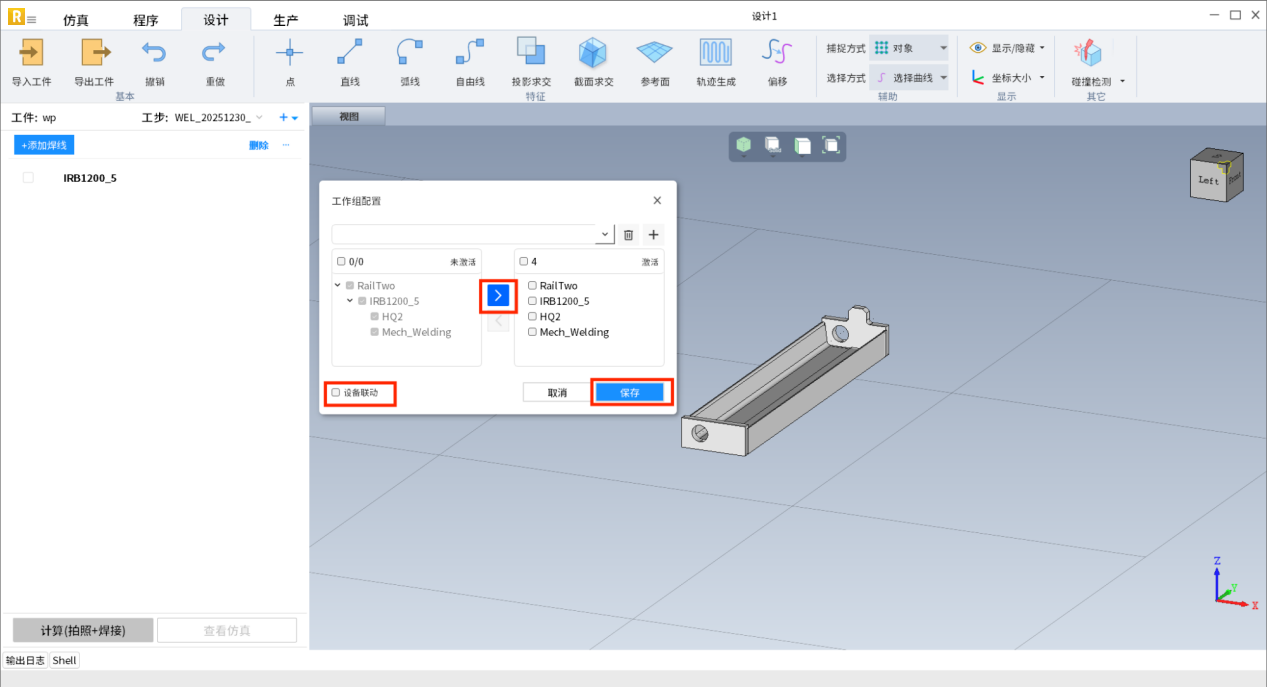
点击保存后,工作组创建按完成,会自动出现名称,如下图所示: 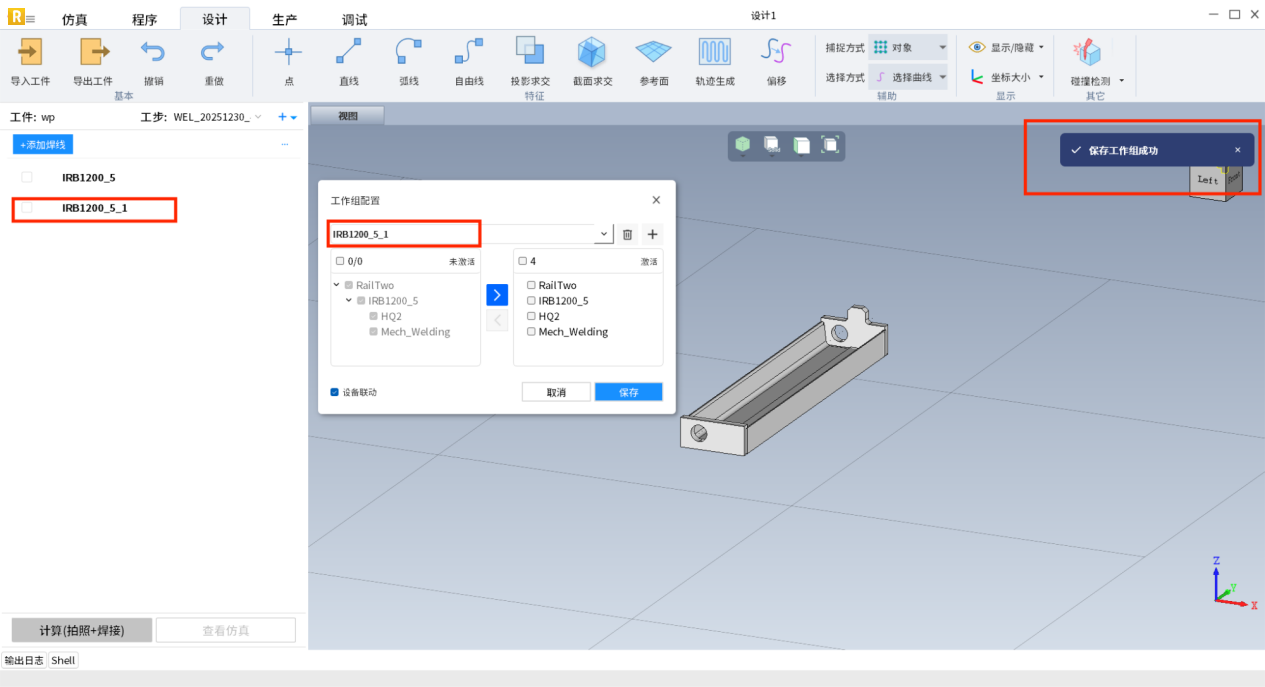
总览步骤: 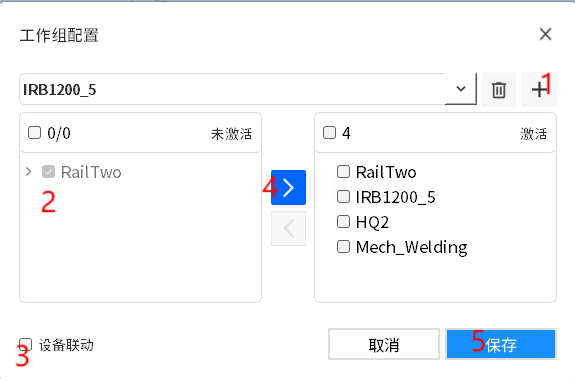 添加好我们想要的工作组后,点击添加焊线,如下图所示:
添加好我们想要的工作组后,点击添加焊线,如下图所示: 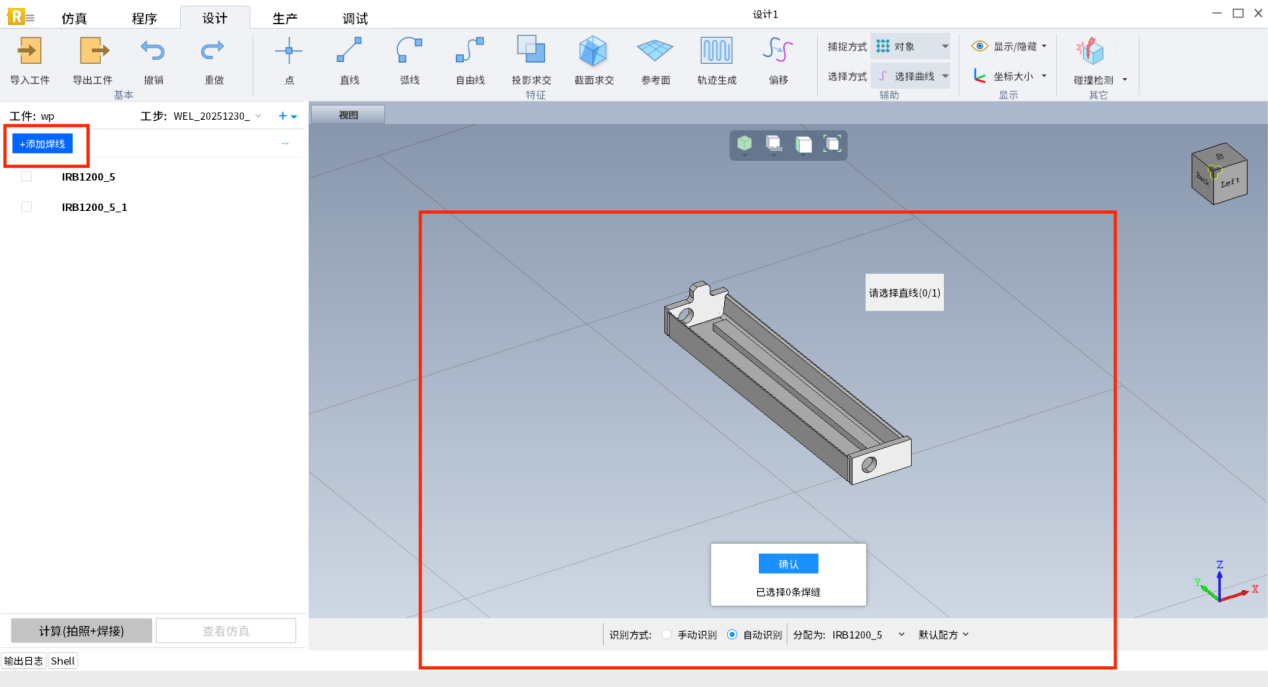
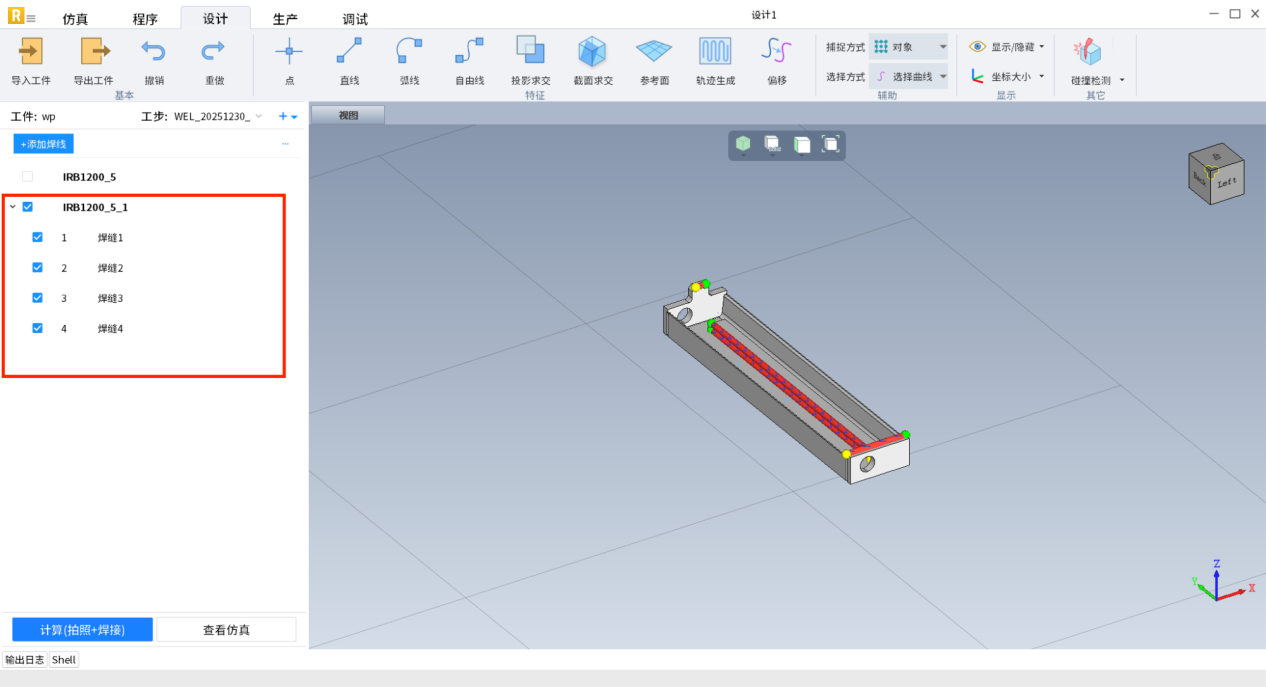
通过鼠标在工件上点击所需焊线即可选中该焊线,本案例选取4条焊线。 选择好的焊线默认分配到默认工作组IRB1200_5中,如下图所示。 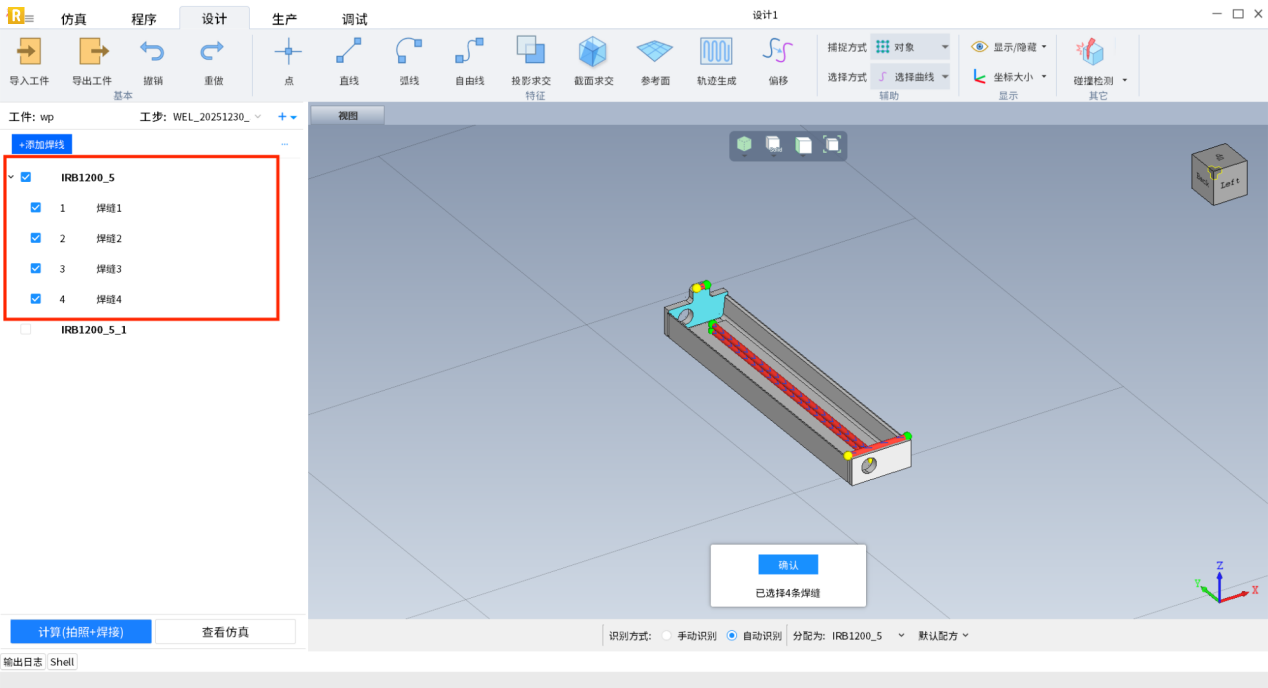
在左侧面板中鼠标直接拖曳(按住Shift可以多选),将所选焊线一键拖曳到新建的工作组IRB1200_5_1中,如下图所示。 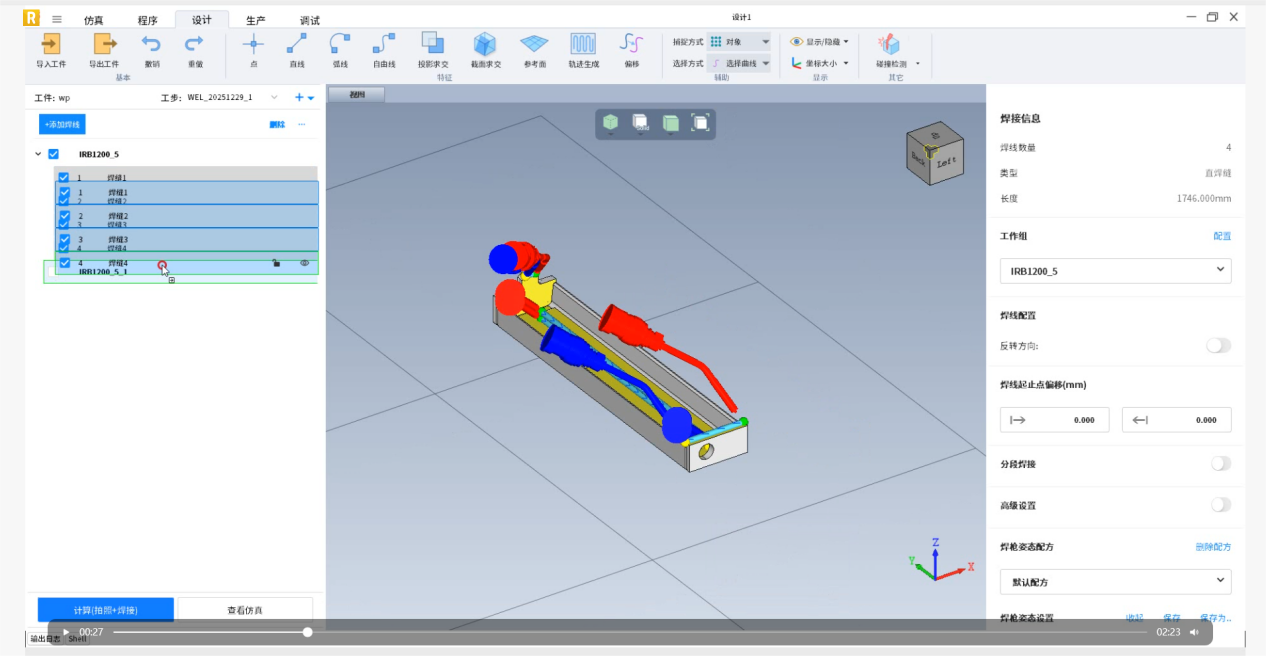
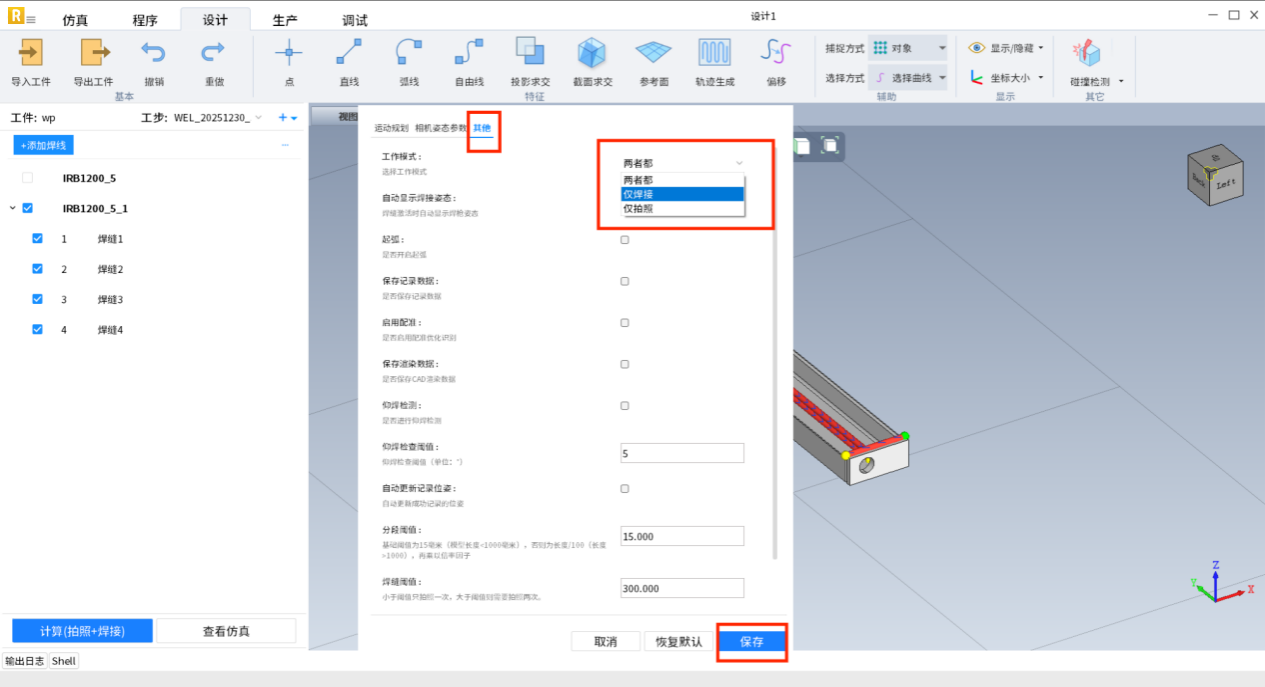
 点击参数设置,可选择工作模式。(在前期仿真验证工作中,选择仅焊接可以提高计算效率,节省时间)
点击参数设置,可选择工作模式。(在前期仿真验证工作中,选择仅焊接可以提高计算效率,节省时间) 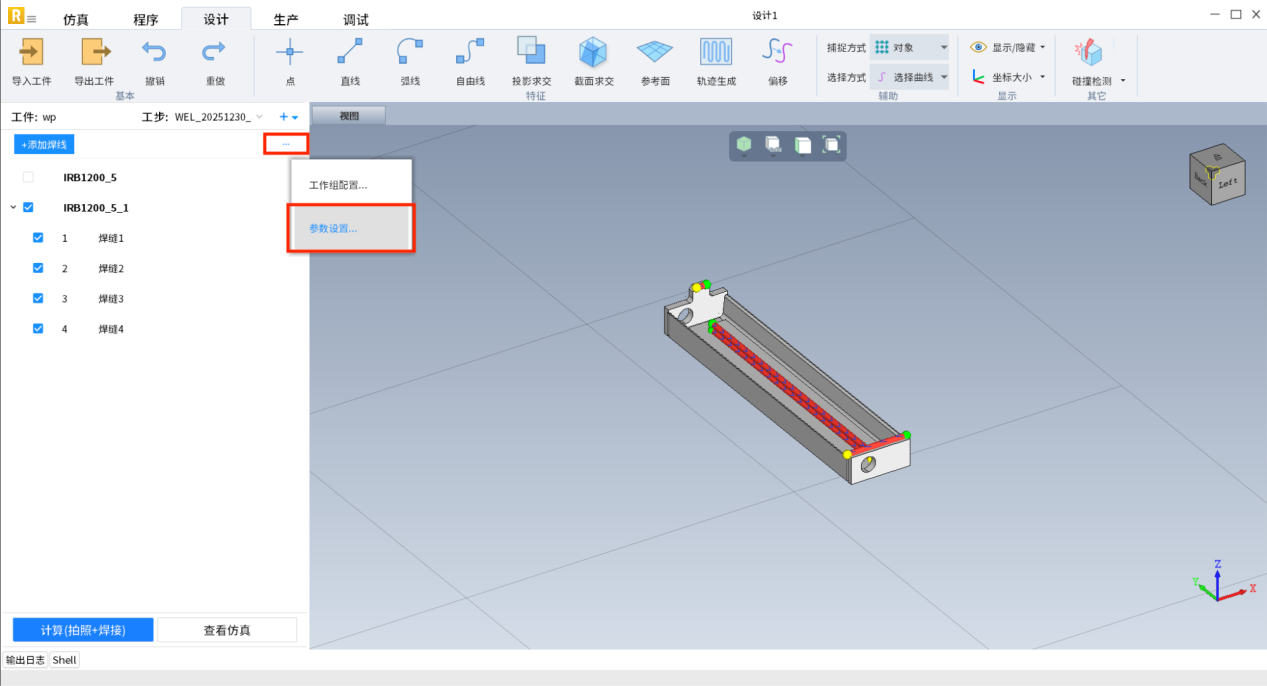
 左侧面板单击焊线,右侧弹出焊线信息面板,显示焊线类型、长度、工作组等信息。每条焊线都可单独设置。
左侧面板单击焊线,右侧弹出焊线信息面板,显示焊线类型、长度、工作组等信息。每条焊线都可单独设置。 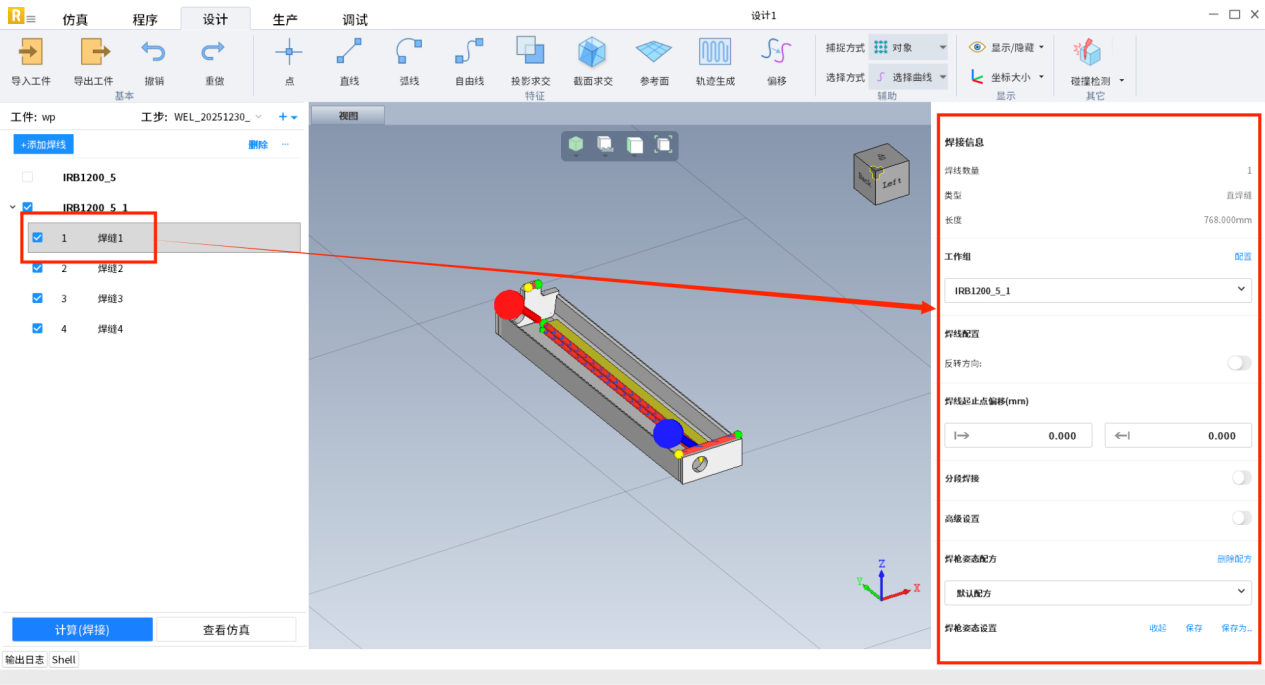
焊枪姿态设置中可调节进退枪侧倾角、Z旋角角度。 之前: 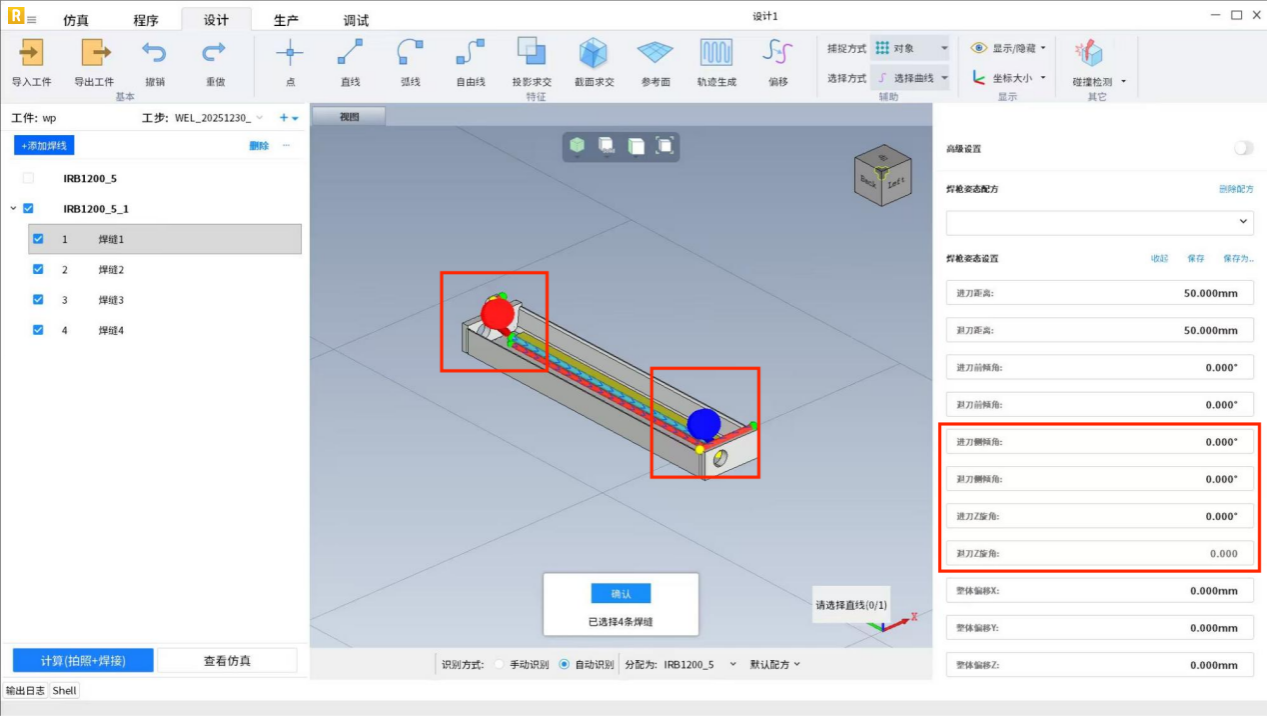
之后: 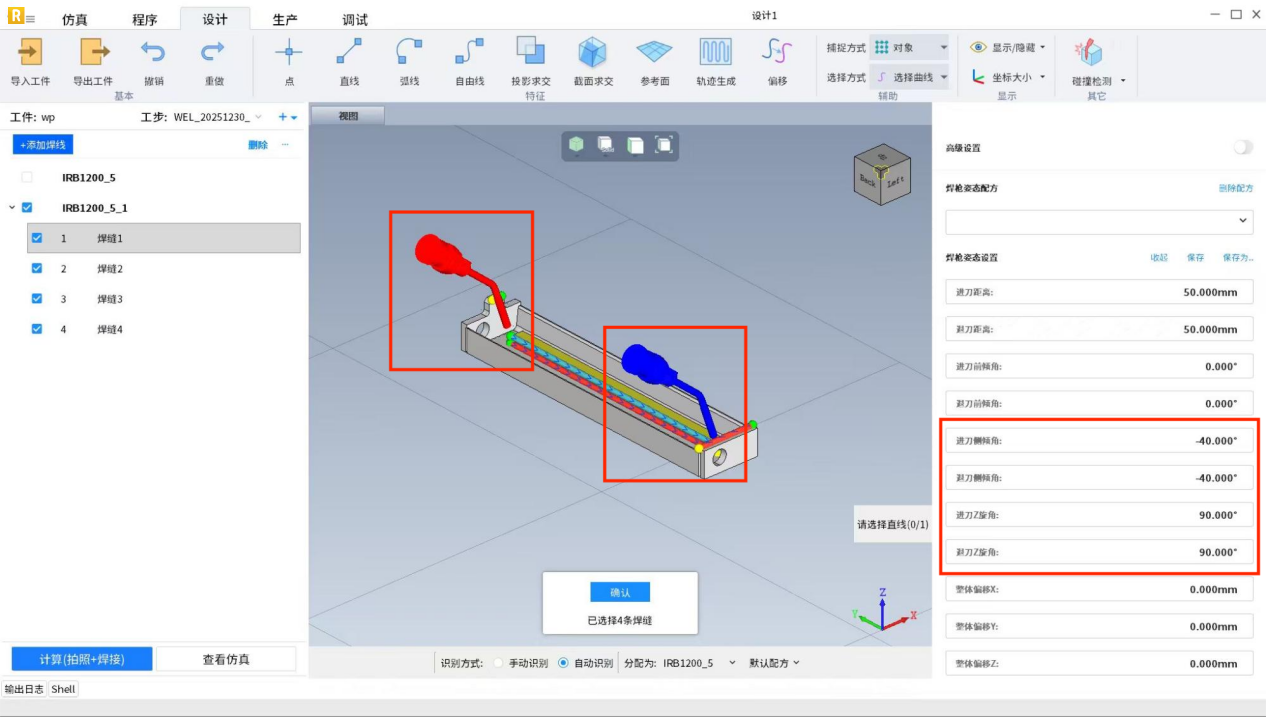
计算仿真
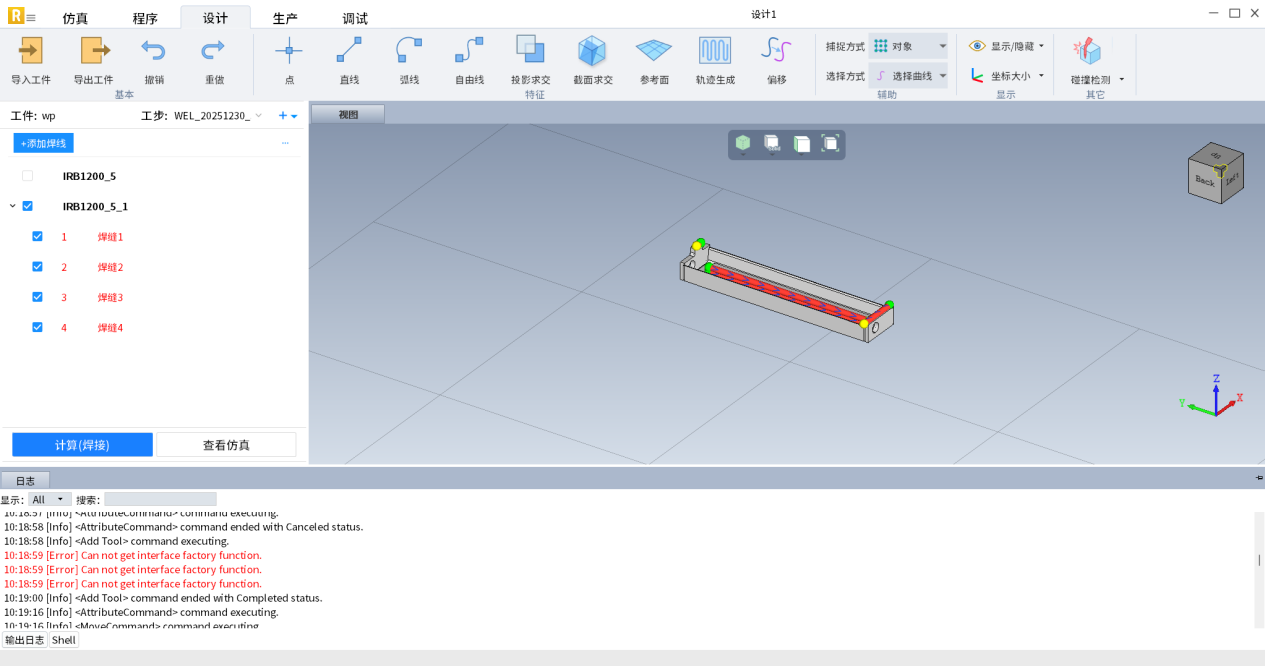
焊线信息设置结束后,点击开始计算。 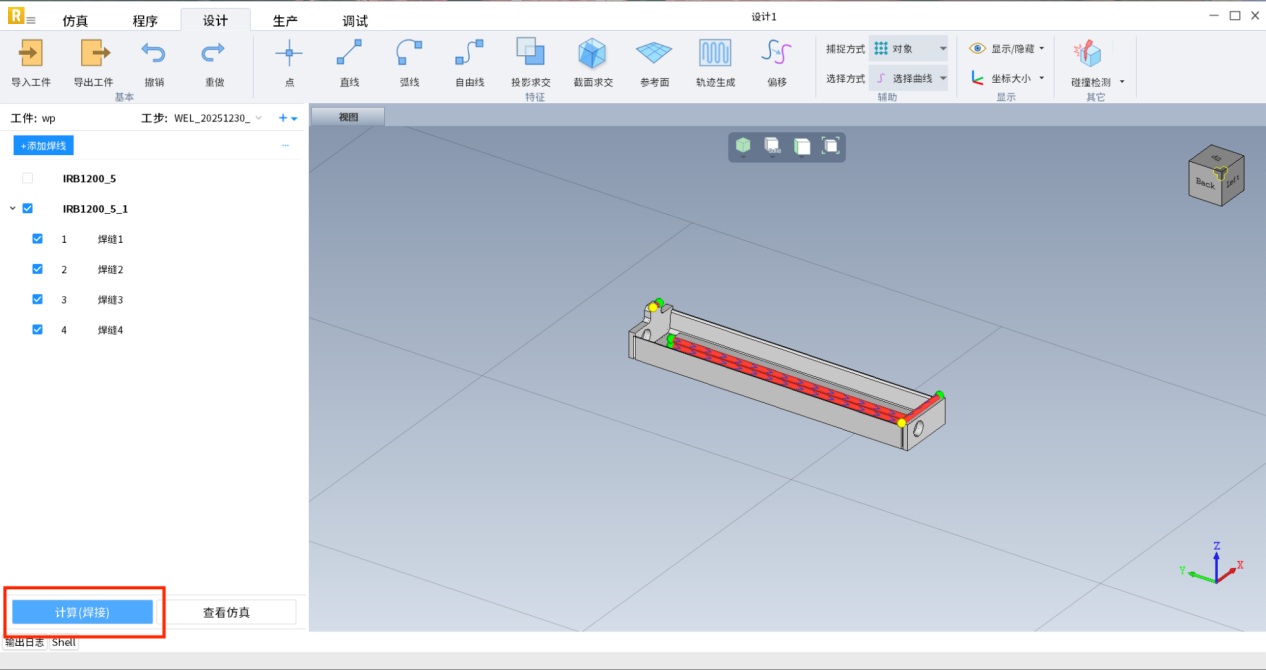 变红说明计算失败,点击日志查看原因。
变红说明计算失败,点击日志查看原因。 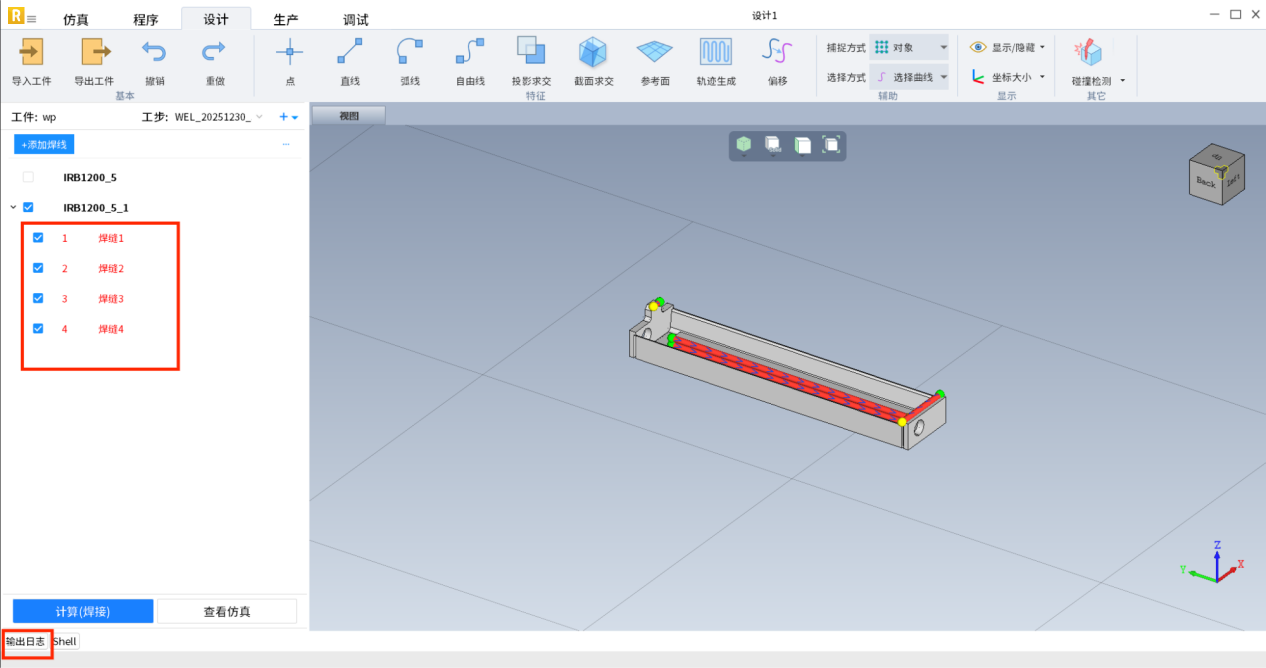
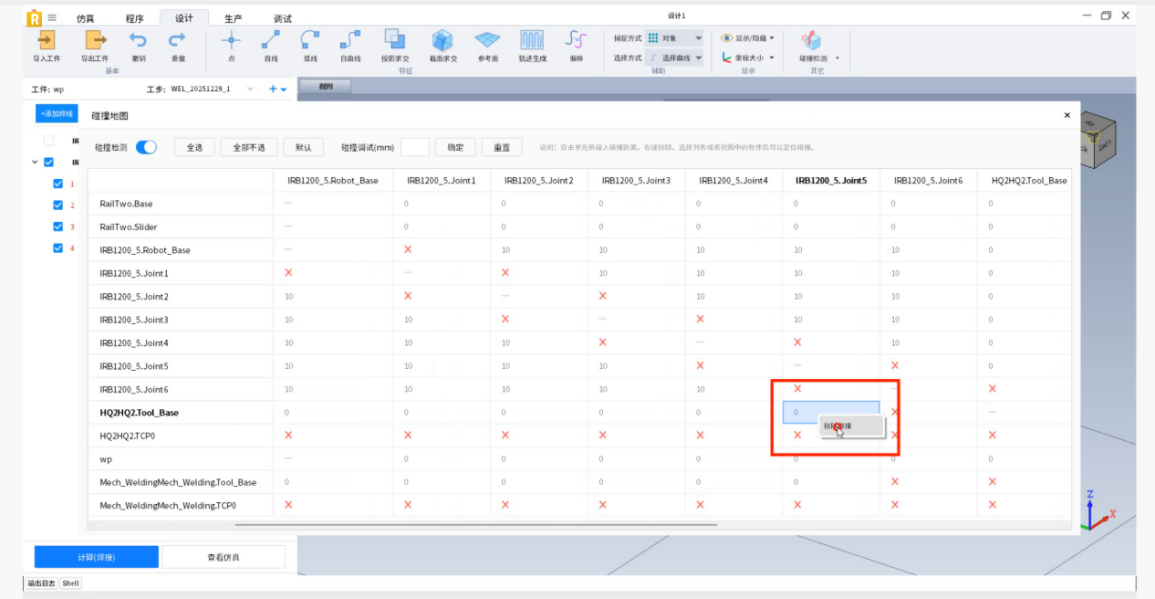
显示类型切换到Trace,可以看到失败具体原因(具体碰撞对象)。 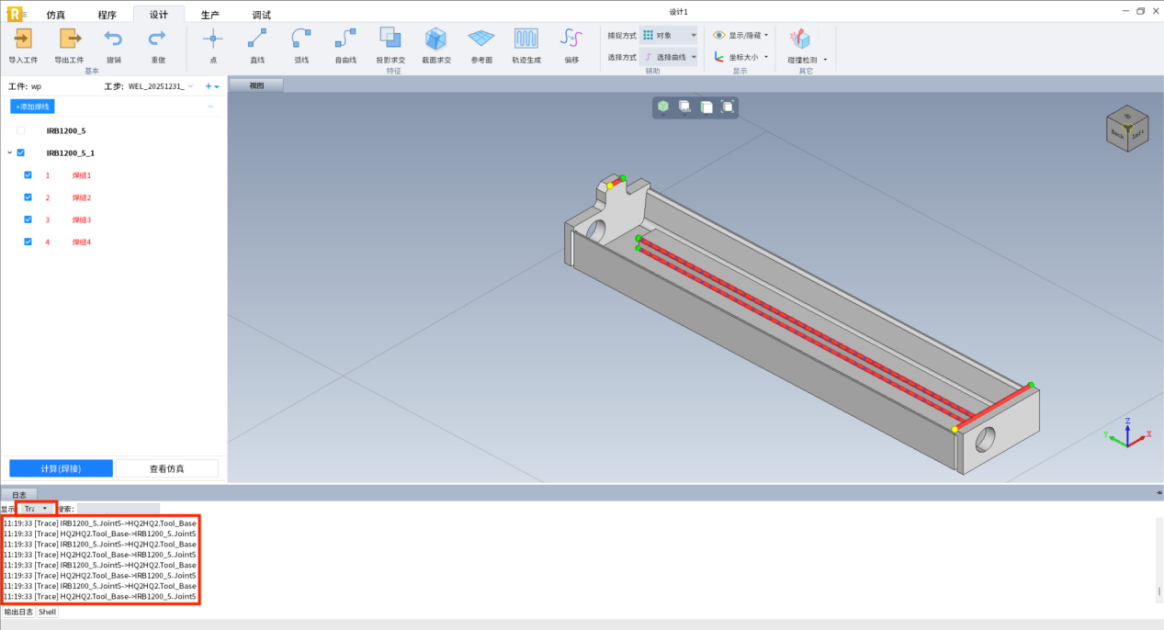
可打开碰撞地图排除日志中显示的碰撞对象。 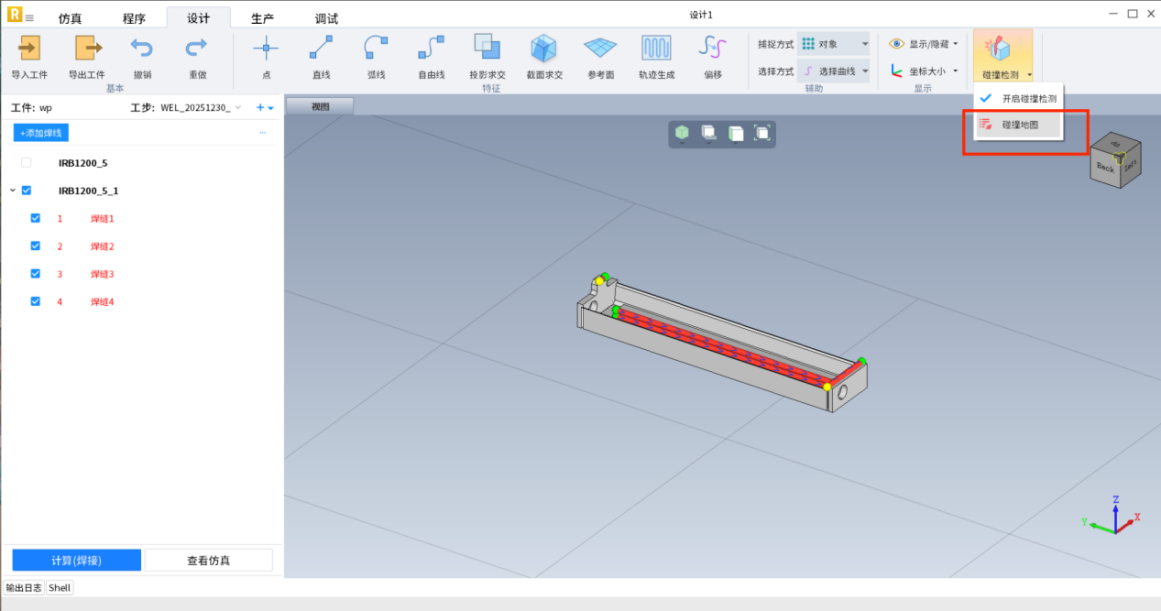
所有设置好后重新点击计算,绿色表示计算成功。 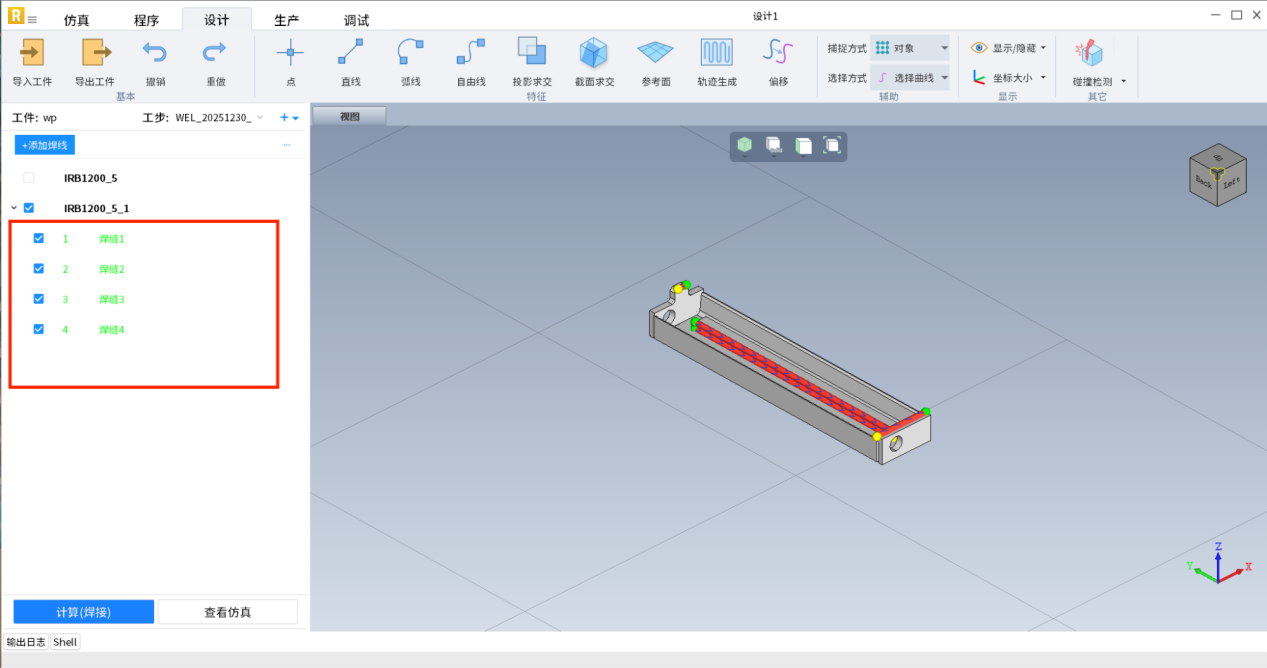
计算成功后可查看仿真动画。